
【cann-samples系列】GroupedMatmul MX量化矩阵乘的深度性能优化实践
cann-samples是CANN社区提供的高性能实践样例库,致力于为开发者提供可复用的优化方法论和优秀实践代码。本系列文章将陆续介绍仓库中的典型样例,分享我们在算子优化过程中的思考与经验。
本文将帮助你
- 了解GroupedMatmul(简称GMM)算子:分组Matmul,专门用于解决MoE(混合专家模型)中不同专家处理token数量不均衡导致的性能瓶颈问题。
- NPU实现MX量化的机制:如何纯AICore实现MX量化矩阵乘。
- 理解GMM MX核心优化思路:负载均衡,私有格式搬运等关键策略的原理与应用。
1 算子功能说明
在GMM中,假定有E个专家,每个专家对应的分组值由输入group_list指定,允许分组值为0,表示该专家未被选中。
- 在M轴分组时,每组的M值由
group_list给出,维度N、K在所有组间相同; - 在K轴分组时,每组的K值由
group_list给出,维度M、N在所有组间相同,仅用于训练场景。
1.1 MX量化计算公式
对每个专家e:
C i , j ( e ) = ∑ g = 0 c e i l ( K / G ) − 1 ( s c a l e A i , g ( e ) ⋅ s c a l e B g , j ( e ) ⋅ ∑ k ′ = 0 G − 1 ( A i , g G + k ′ ( e ) ⋅ B g G + k ′ , j ( e ) ) ) C^{(e)}_{i, j} = \sum^{ceil(K/G)-1}_{g=0}\left(scaleA^{(e)}_{i, g} \cdot scaleB^{(e)}_{g, j} \cdot \sum^{G-1}_{k'=0} (A^{(e)}_{i, gG+k'} \cdot B^{(e)}_{gG + k', j}) \right) Ci,j(e)=g=0∑ceil(K/G)−1(scaleAi,g(e)⋅scaleBg,j(e)⋅k′=0∑G−1(Ai,gG+k′(e)⋅BgG+k′,j(e)))
其中G=32为MX量化的K维group size。
1.2 GMM计算逻辑
GMM可看作E个单Matmul组成,按分组更新A/B/ScaleA/ScaleB/C GM基址偏移。
- M轴分组
将当前组的(M_e, N, K)视作单个MX矩阵乘。以行维度M为划分依据,将整体矩阵乘拆分为多个行维度M分片子矩阵乘,A (M, K) B (E, N, K),对于任意K,NPU MX scale的K轴长度需为ceil(K/64) * 2。各组B矩阵大小一致,各组输出沿M维度拼接。
Figure 1. GMM M轴分组计算逻辑示意图
-
K轴分组
将当前组的(M, N, K_e)视作单个MX矩阵乘。以内积收缩维度K为划分依据,A (K, M) B (K, N)。将K维度切分为多个子通道块,各组输出大小一致,各组在对应K分片上独立计算并顺序拼接结果。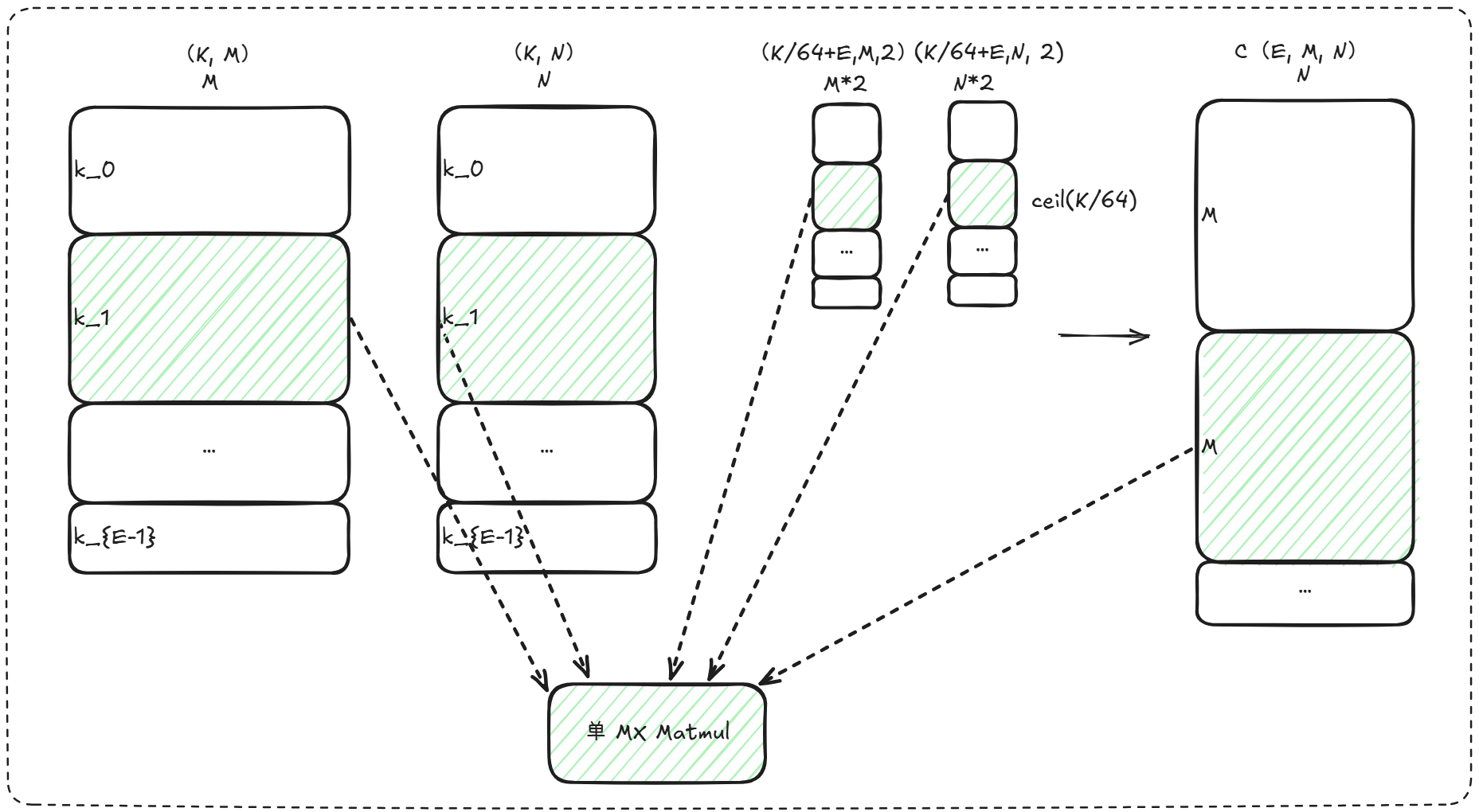
Figure 2. GMM K轴分组计算逻辑示意图
1.3 支持的MX量化
1.3.1 MXFP4参数说明
MXFP4 旨在追求优秀的缓存利用率和性能,但其精度有限,无法支撑训练场景中的迭代需求,目前GMM MXFP4仅支持M轴分组用于推理场景。
| 变量名 | 描述 | Dtype | Layout | Shape |
|---|---|---|---|---|
| A | 输入左矩阵 | float4_e2m1/float4_e1m2 |
ND | 整体(M, K),按M分组切片 |
| B | 输入右矩阵 | float4_e2m1/float4_e1m2 |
ND/DN/NZ/ZN | (E, K, N)/(E, N, K)/(E, N1, K1, K0, N0)/(E, K1, N1, N0, K0),每个分组大小相同 |
| scaleA | 左矩阵量化参数 | float8_e8m0 |
ND | 整体(M, ceil(K/64), 2),与A同M拼接规则 |
| scaleB | 右矩阵量化参数 | float8_e8m0 |
ND/DN | (E, ceil(K/64), N, 2)/(E, N, ceil(K/64), 2),每个分组大小相同,转置属性同B |
| C | 输出 | bfloat16/float16/float32 |
ND | 整体(M, N),与A同M拼接规则 |
注:MXFP4的NZ/ZN的后两维为
(16, 64)。
1.3.2 MXFP8参数说明
为明确区分两类分组方式,以下按M轴分组与K轴分组分别给出各参数的逻辑形状与布局约束。
| 变量名 | 描述 | Dtype | M轴分组 | K轴分组 | ||
|---|---|---|---|---|---|---|
| Layout | Shape | Layout | Shape | |||
| A | 输入左矩阵 | float8_e4m3fn/float8_e5m2 |
ND |
(M, K) |
DN |
(K, M) |
| B | 输入右矩阵 | float8_e4m3fn/float8_e5m2 |
ND/DN/NZ/ZN |
(E, K, N)/(E, N, K)/(E, N1, K1, K0, N0)/(E, K1, N1, N0, K0) |
ND |
(K, N) |
| scaleA | 左矩阵量化参数 | float8_e8m0 |
ND |
(M, ceil(K/64), 2) |
DN |
(K/64 + E, M, 2) |
| scaleB | 右矩阵量化参数 | float8_e8m0 |
DN/ND |
(E, N, ceil(K/64), 2)/(E, ceil(K/64), N, 2),每个分组大小相同,转置属性同B |
ND |
(K/64 + E, N, 2) |
| C | 输出 | bfloat16/float16/float32 |
ND |
整体(M, N) |
ND |
整体(E, M, N) |
注:MXFP8的NZ/ZN的后两维为
(16, 32)。
2 NPU实现MX量化的机制
2.1 硬件原理
NPU MX矩阵乘利用float8_e8m0格式仅存储指数,配合A/B矩阵存储数据尾数与局部指数,在分型矩阵乘中通过指数加法融合缩放因子,避免了显式反量化带来的值域损失。
2.2 指数与尾数的分离计算
在普通float8/float4的矩阵乘中,每个MMAD里PE(Processor Element) 计算得到的部分和由符号、指数和尾数构成,MX矩阵乘亦是。
-
单个float数可记为
x = sign × 2 e × m x = \text{sign} \times 2^{e} \times m x=sign×2e×m
其中 e e e为指数, m m m为尾数。 -
两个低bit float数的分型乘积为
c fp = ( sign A × 2 e A × m A ) ⋅ ( sign B × 2 e B × m B ) = sign × 2 e A + e B × ( m A ⋅ m B ) c_{\text{fp}} = \left( \text{sign}_A \times 2^{e_A} \times m_A \right) \cdot \left( \text{sign}_B \times 2^{e_B} \times m_B \right) = \text{sign} \times 2^{e_A+e_B} \times (m_A \cdot m_B) cfp=(signA×2eA×mA)⋅(signB×2eB×mB)=sign×2eA+eB×(mA⋅mB) -
MX的分型乘积为
c mx = c fp × 2 e scaleA × 2 e scaleB = sign × 2 e A + e B + e scaleA + e scaleB × ( m A ⋅ m B ) c_{\text{mx}} = c_{\text{fp}} \times 2^{e_{\text{scaleA}}} \times 2^{e_{\text{scaleB}}} = \text{sign} \times 2^{e_A+e_B + e_{\text{scaleA}} + e_{\text{scaleB}}} \times (m_A \cdot m_B) cmx=cfp×2escaleA×2escaleB=sign×2eA+eB+escaleA+escaleB×(mA⋅mB)
因此,MX矩阵乘可由NPU AICore实现,一个分型(fp8:16*16*32,fp4:16*16*64)乘加一次仅一Cycle,MX矩阵乘与普通同低bit 矩阵乘的算力相同。
3 GMM MX核心优化实践
本样例实现了完整的优化策略体系(详见cann-samples GMM mx量化性能优化文档),以下重点介绍GMM最具代表性的几种。
3.1 负载均衡的3种实现
- 核负载均衡率的计算公式
核负载均衡率 = 平均负载 最大负载 × 100 % \text{核负载均衡率} = \frac{\text{平均负载}}{\text{最大负载}} \times 100\% 核负载均衡率=最大负载平均负载×100%
此处负载仅为M/K/N维度的计算量,平均负载是理想的核完全均匀计算的指标。算子性能的提升与负载均衡率呈正相关,但二者未必保持等比例关系。- MEM bound,算子性能提升率一般小于核负载均衡率的提升;
- CUBE bound,算子性能提升率约等于核负载均衡率的提升。
3.1.1 group间负载均衡
GMM每个分组Matmul使用基本块(baseM, baseN)策略进行多核分配,很大可能单分组Matmul的block块数并不能被开启的核数整除。为了高效使用每一个核,下一个分组Matmul接着上一个分组Matmul结束的核数往下分配核,避免每个分组Matmul均从0核开始计算。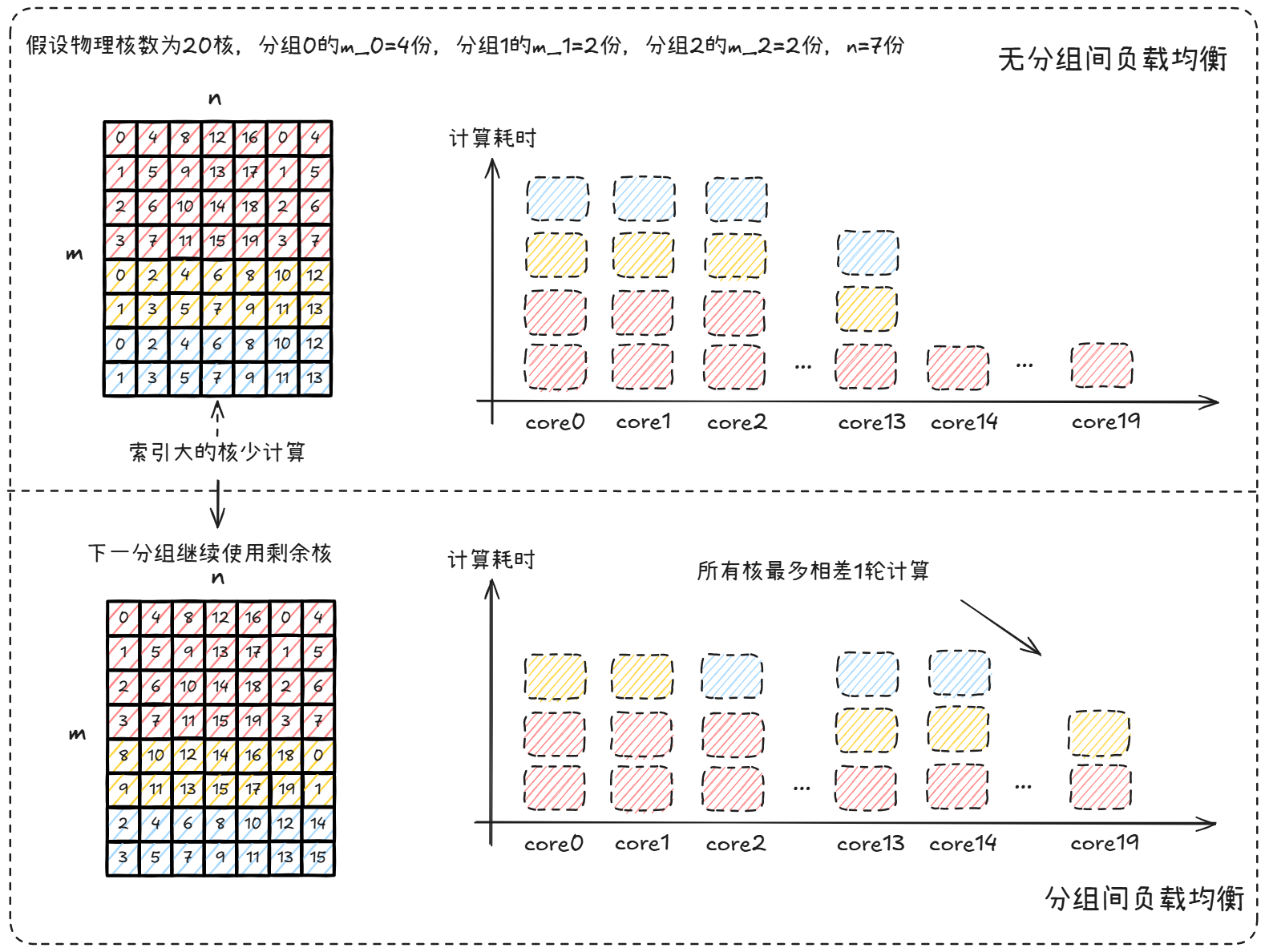
上图的平均负载为 2.8(56 blocks / 20 cores),优化前后的最大负载分别为 4和3,则核负载均衡率从70%提升至93.33%。
3.1.2 M轴分组M负载均衡
M轴分组时每分组M_e在host侧未知,若每个分组按照基本块(baseM, baseN)分核,有可能一些核M轴计算量为baseM,其它核M轴计算量远小于baseM时,算子的整体性能将由最晚完成计算的核所决定,这种现象即为“快慢核”所引发的性能劣化问题。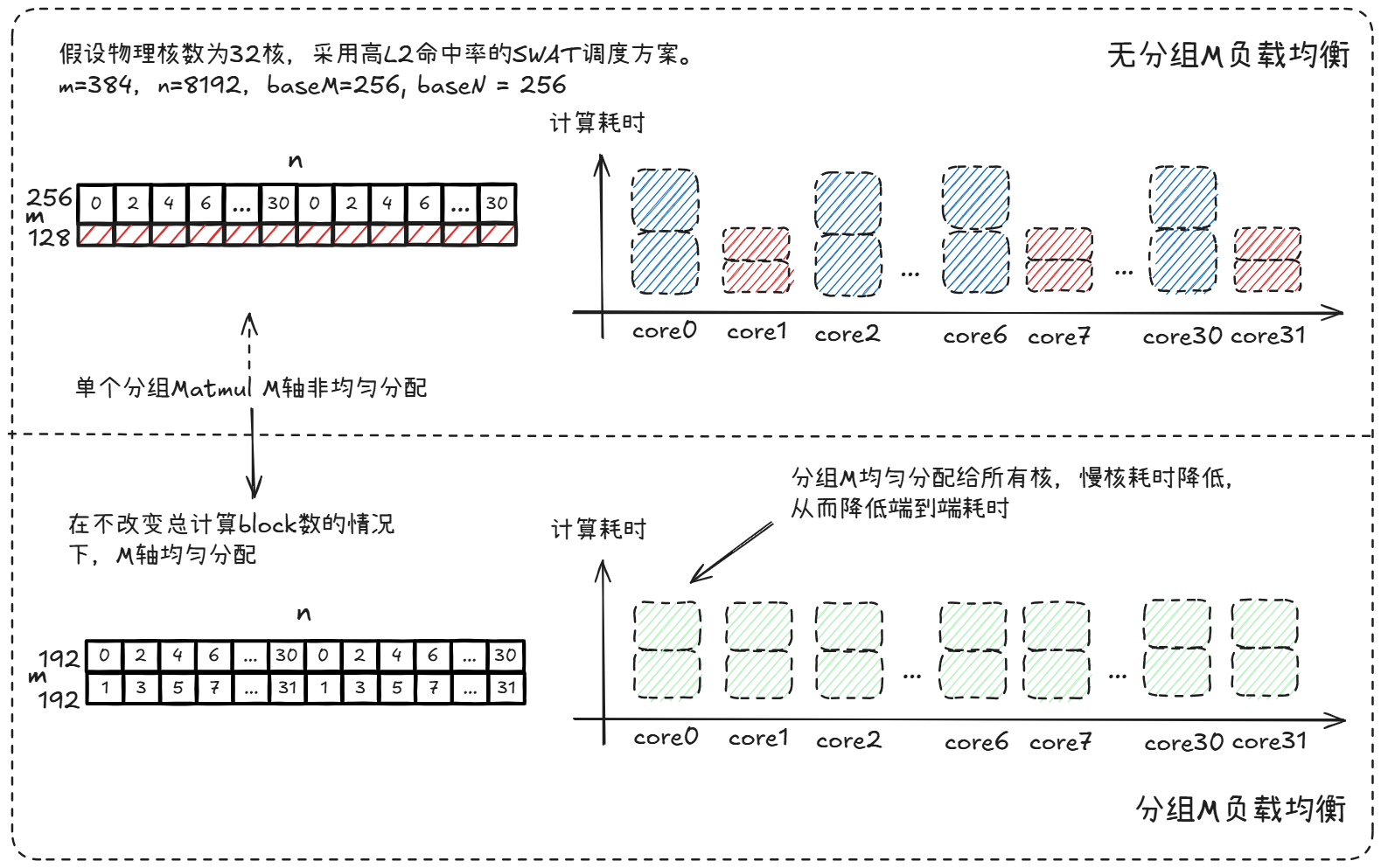
上图为1个专家的M负载均衡原理图,在32核上刚好跑2轮。优化前,偶数核2轮M轴计算量均为256,奇数核2轮M轴计算量均为128,核负载均衡率为75%。使能分组M负载均衡后,奇偶核的M轴计算量均为192,核负载均衡率为100%。
当前实验环境为Ascend950PR, GM带宽1.6T/s,32核。
E=2,M轴分组,K=2048,N=8192,分组值分别为384,800和1900,baseN=256,baseM从256分别均衡到192,208和240。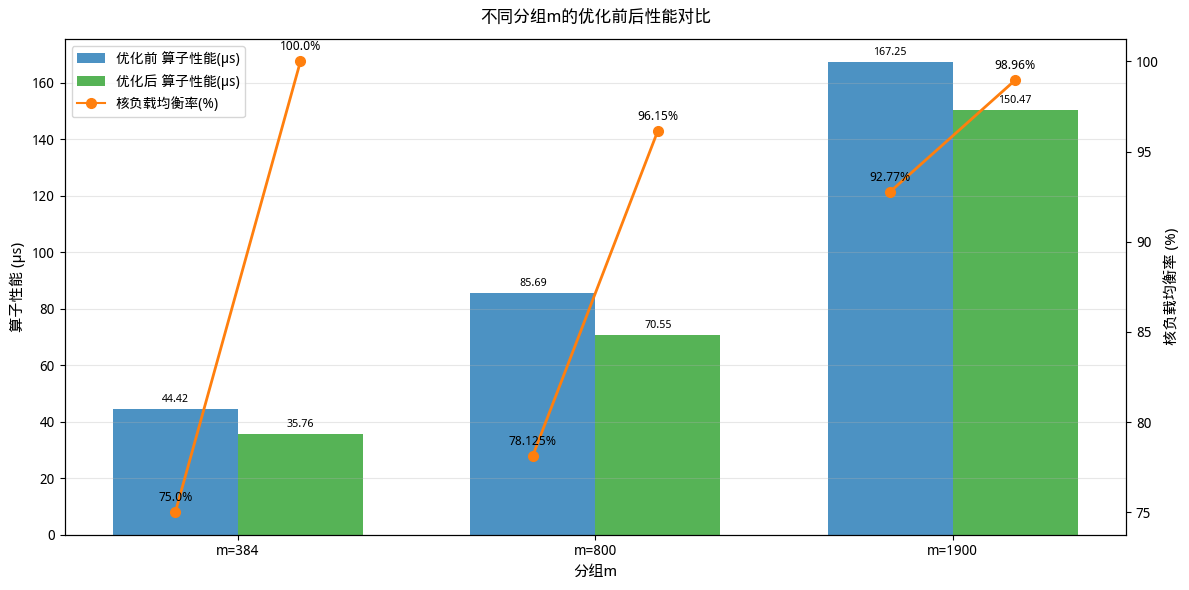
3.1.3 最后一个group尾轮负载均衡
在处理不同规格输入时,划分的基本块无法均匀分配到所有核上,导致分核不均。需要针对最后一轮基本块进行二次切分(支持切分M和N轴),使其尽量均匀分配到多核中,充分发挥完整算力。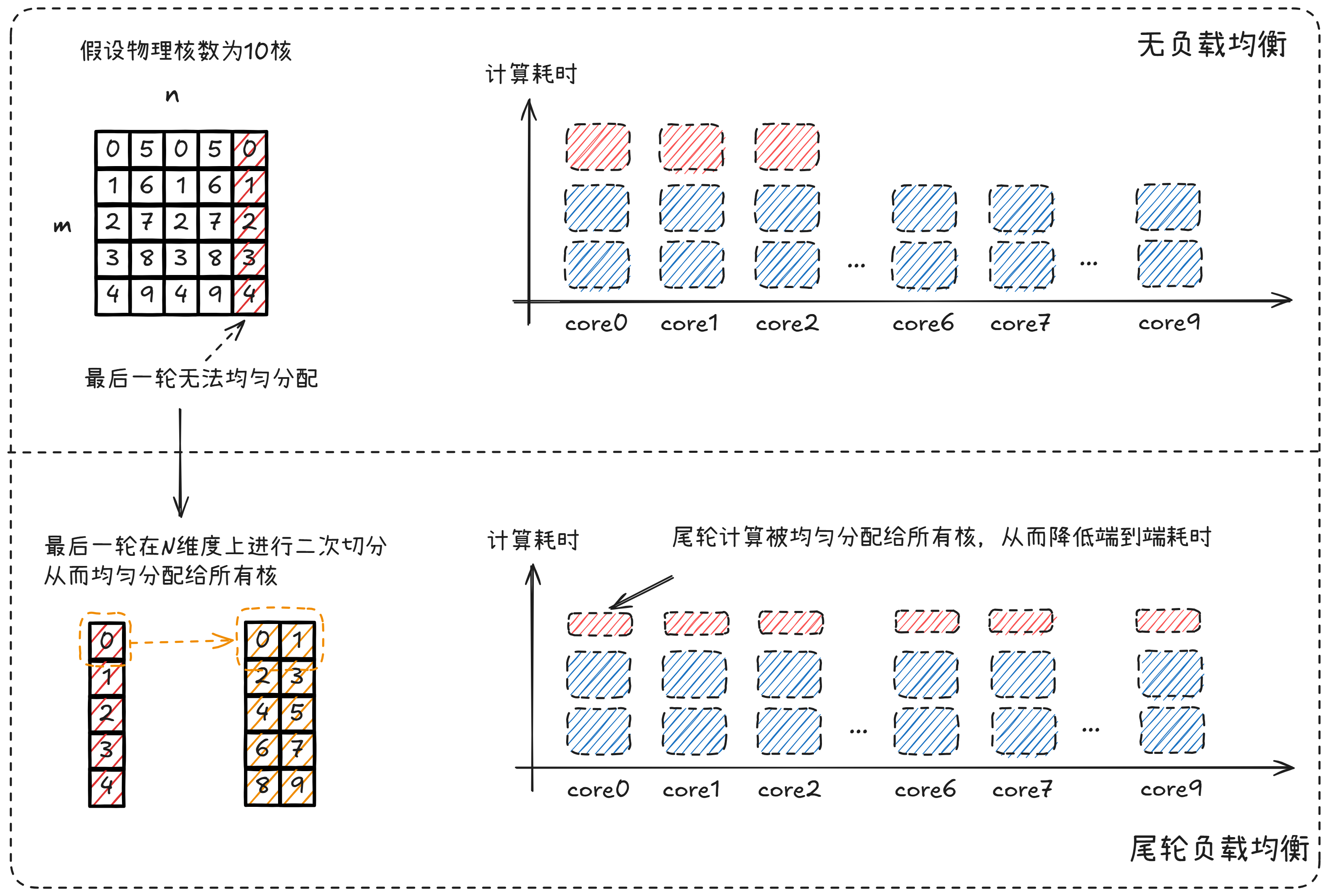
当前实验环境为Ascend950PR, GM带宽1.6T/s,32核。
E=2,M轴分组,group_list={256,256},M=1024,K=2048,N=5120
启用尾轮负载均衡前,最大负载的核0需计算2个(256, 256)基本块,尾轮仅8个核计算,核负载均衡率仅为 62.5%。优化后,所有核均需计算1个 (256, 256)基本块和尾轮的1个(128, 128)基本块,核负载均衡率可到100%。
3.2 scalar优化
GMM的kernel主流程为:
void Run(const Params& params) {
// 初始化
Init(params);
// 创建调度器
using SchedulerOp = BlockScheduler;
SchedulerOp bs(params.schedulerParams);
// 遍历所有分组
for (uint32_t groupIdx = 0; groupIdx < groupNum_; ++groupIdx) {
// 更新当前分组偏移
UpdateOffset(groupIdx);
// 设置当前分组的 M, N, K
SetMNK(groupIdx);
// 获取问题形状中的 M 和 K
auto M = get<MNK_M>(problemShape_);
auto K = get<MNK_K>(problemShape_);
// 若 M 或 K 非正,跳过该分组
if (M <= 0 || K <= 0) {
continue;
}
// 更新 MMAD 运算单元shape参数
mmadOp_.UpdateParamsForNextProblem(problemShape_);
// M轴分组的M负载均衡
BaseMBalance(bs, M, params.kernelParams.baseM);
// 构造调度器问题形状 (M, N, K, 1)
typename SchedulerOp::TupleShape bsProblemShape = {M, N, K, 1L};
// 更新调度器的下一个问题
bs.UpdateNextProblem(bsProblemShape);
// 判断是否为最后一个分组且需要拆分
if (IsLastGroupAndNeedSplit(bs, groupIdx)) {
bs.UpdateTailTile(); // 使能尾轮切分
ProcessSingleGroup(params, bs, false); // false: 尾部处理,包含该分组的tensor构造
} else {
ProcessSingleGroup(params, bs, true); // true: 正常处理,包含该分组的tensor构造
}
}
}
从主流程Run函数可以看出,除了ProcessSingleGroup里带有分组矩阵乘计算,其它均为scalar。
GMM scalar优化项:
- 并不是每个核需要计算每个专家,信息非必要不更新,如分组偏移,MMAD shape更新,该分组的tensor构造
- 每个循环内减少判断是否是最后一个group,分主尾group
- 减少重复计算,如分组偏移里M轴分组B偏移
- 尽可能使用位运算
- 减少if scalar判断,尽可能使用常量判断
- 避免新建不必要变量
主流程优化后:
void Run(const Params& params) {
Init(params);
// 创建调度器
using SchedulerOp = BlockScheduler;
SchedulerOp bs(params.schedulerParams);
// 处理前 groupNum_ - 1 个分组
for (uint32_t groupIdx = 0; groupIdx < groupNum_ - 1; ++groupIdx) {
SetMNK(groupIdx);
auto M = get<MNK_M>(problemShape_);
auto K = get<MNK_K>(problemShape_);
if (M <= 0 || K <= 0) {
continue;
}
BaseMBalance(bs, M, params.kernelParams.baseM);
bs.UpdateNextProblem(problemShape_);
ProcessSingleGroup<false>(params, bs, groupIdx); // 普通处理
}
// 处理最后一个分组(groupNum_ > 0)
uint32_t groupIdx = groupNum_ - 1;
SetMNK(groupIdx);
auto M = get<MNK_M>(problemShape_);
auto K = get<MNK_K>(problemShape_);
if (M > 0 && K > 0) {
BaseMBalance(bs, M, params.kernelParams.baseM);
bs.UpdateNextProblem(problemShape_);
if (IfNeedSplit(bs)) {
bs.UpdateTailTile(); // 使能尾轮切分
ProcessSingleGroup<true>(params, bs, groupIdx); // 尾部拆分处理,包含该分组的tensor构造
} else {
ProcessSingleGroup<false>(params, bs, groupIdx); // 普通处理,包含该分组的tensor构造
}
}
}
当前实验环境为Ascend950PR, GM带宽1.6T/s,32核。
E=128,M轴分组,分组M值均为256,M=32768,K=2048,N=96
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| scalar优化前 | 67.608 | 17.258 | 0.258 | 20.172 | 0.302 | 10.012 | 0.15 | 56.556 | 0.846 | 13.32 | 0.199 |
| scalar优化后 | 65.297 | 16.929 | 0.262 | 15.772 | 0.244 | 9.8 | 0.152 | 57.389 | 0.889 | 12.623 | 0.195 |
本用例baseM=256,baseN=96,每个核每隔32个专家计算一个专家(仅一个block块),scalar耗时从20.17us降至15.77us(优化4.4us,21.8%),scalar占比从30.2%降至24.4%。而算子耗时仅从67.608us降至65.297us,scalar优化对算子性能提升程度要视scalar是否阻塞流水或scalar bound而定,而scalar优化是必做的。
3.3 高搬运带宽的私有数据排布
数据和 scale 均可从 GM 中直接以私有格式(可统称为 NZ)加载至 L1,从而提升 MTE2 的搬运带宽。
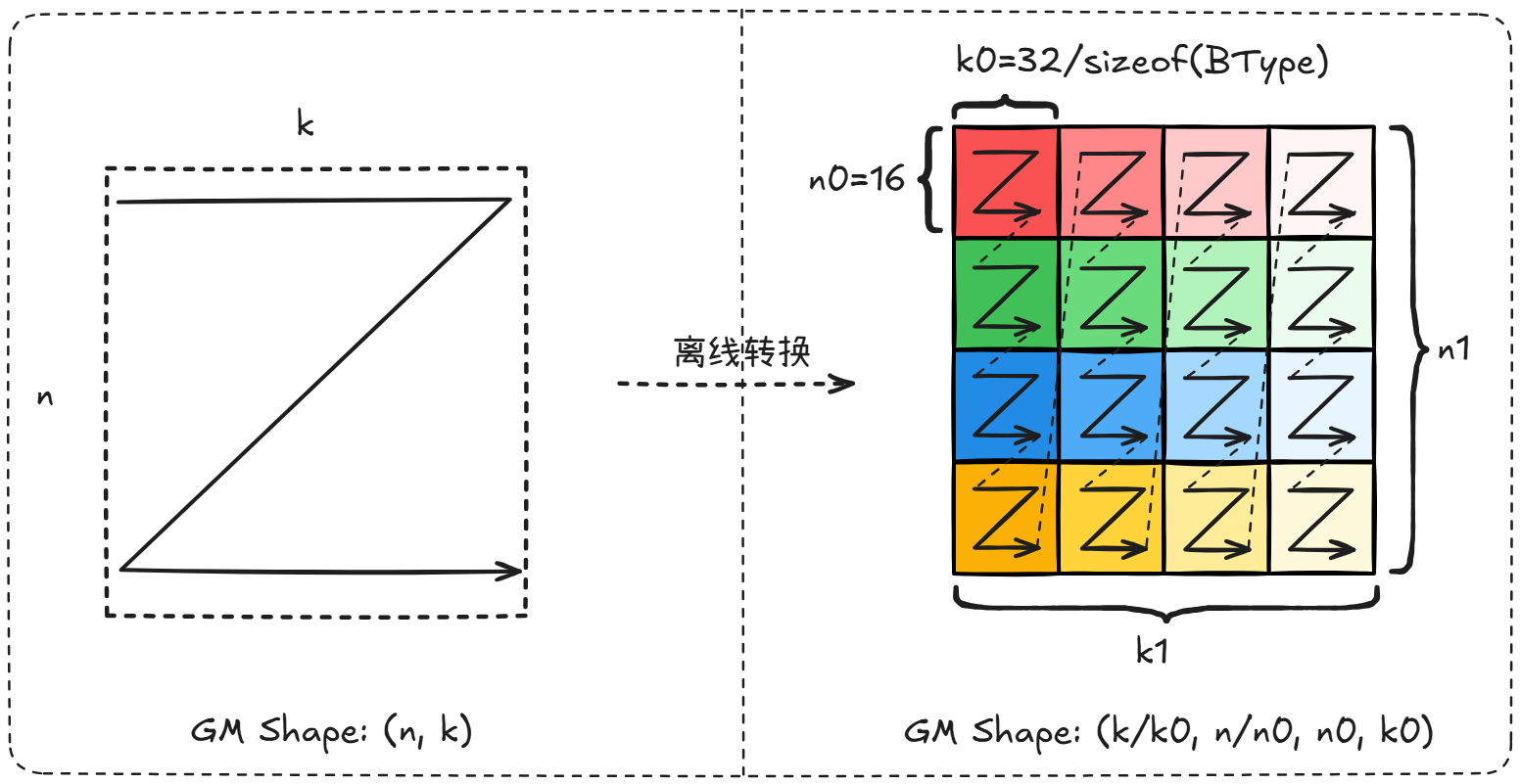
3.3.1 weight NZ
当前实验环境为Ascend950PR和Ascend950DT, GM带宽1.6T/s和4T/s,32核。
E=6,group_list={1,1,1,1,1,1},M=32,K=1536,N=24576,mem bound,收益场景
| 芯片 | 全ND耗时(us) | B NZ耗时(us) | 性能优化率 |
|---|---|---|---|
| 950PR | 149.707 | 148.984 | 0.48% |
| 950DT | 83.688 | 75.669 | 9.58% |
3.3.2 scaleB NZ
由于 scale 的 K 维与数据的 K 维存在 group size = 32 倍的关系,scale 的 K 轴通常较小,甚至不满足256B对齐,因而导致带有格式转换的指令的带宽利用率低于数据搬运。
进一步地,scale 数据从 L1 搬运至 L0A_MX 或 L0B_MX 时不具备转置(transpose)功能。因此,GM 中 scaleB 的私有格式应与 L1 及 L0B_MX 上的存储格式保持一致,即 (n1, ceil(k/64), n0, 2),其中 n0=16, n1=ceil(n/n0)。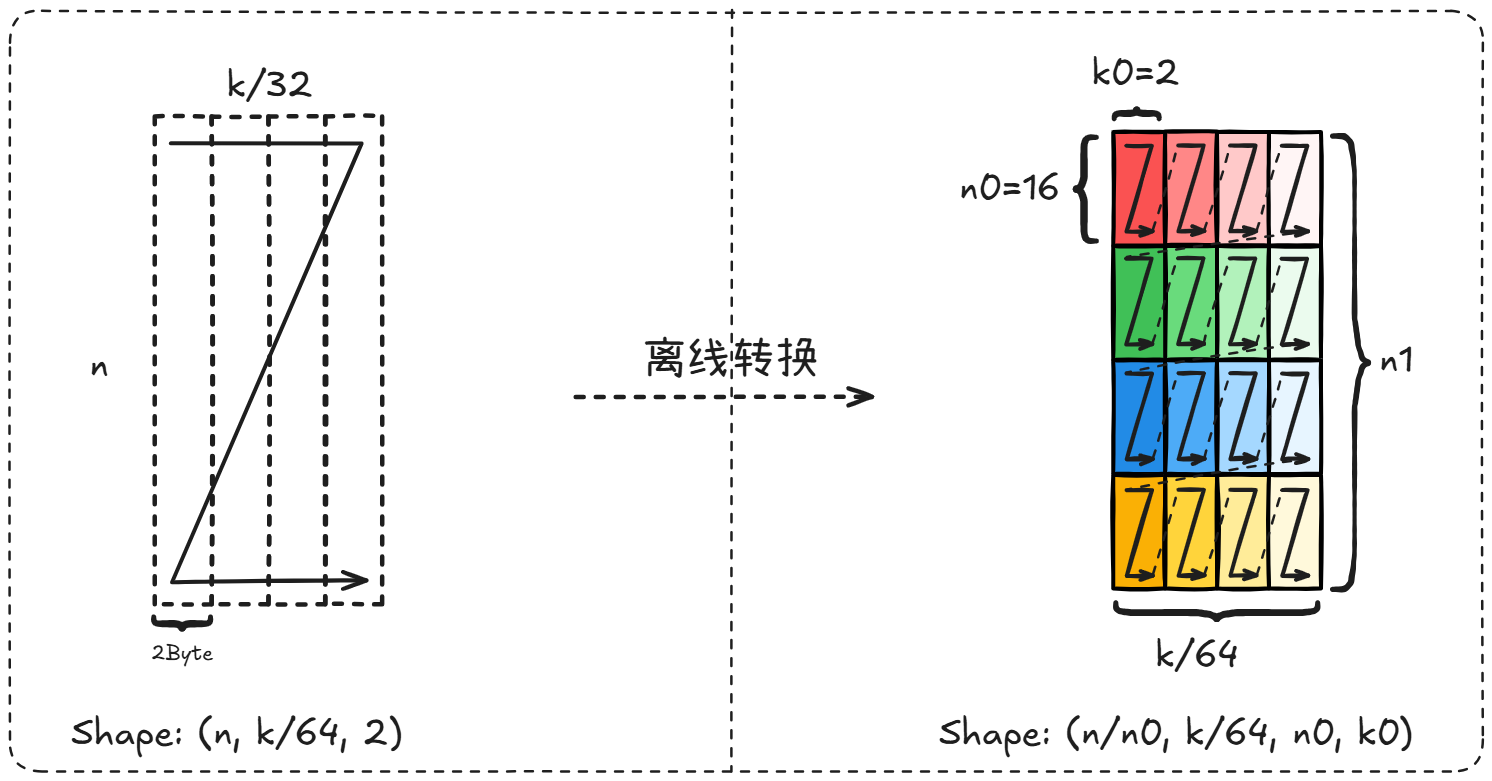
当前实验环境为Ascend950PR和Ascend950DT, GM带宽1.6T/s和4T/s,32核。
E=6,group_list={1,1,1,1,1,1},M=32,K=1536,N=24576,mem bound,收益场景
| 芯片 | 全ND耗时(us) | scaleB NZ耗时(us) | 性能优化率 |
|---|---|---|---|
| 950PR | 149.707 | 149.54 | 0.11% |
| 950DT | 83.688 | 82.951 | 0.88% |
3.4 双页表
默认情况下,GM数据经L2缓存进入L1,但因weight数据量大,其加载过程会迫使L2中的有效数据回写至GM,产生额外MTE2开销。如果在小m(<=baseM)场景下,weight数据仅使用一次,若将其从GM直接加载至L1,不仅不会增加原有加载耗时,还可避免非必要的L2有效数据回写。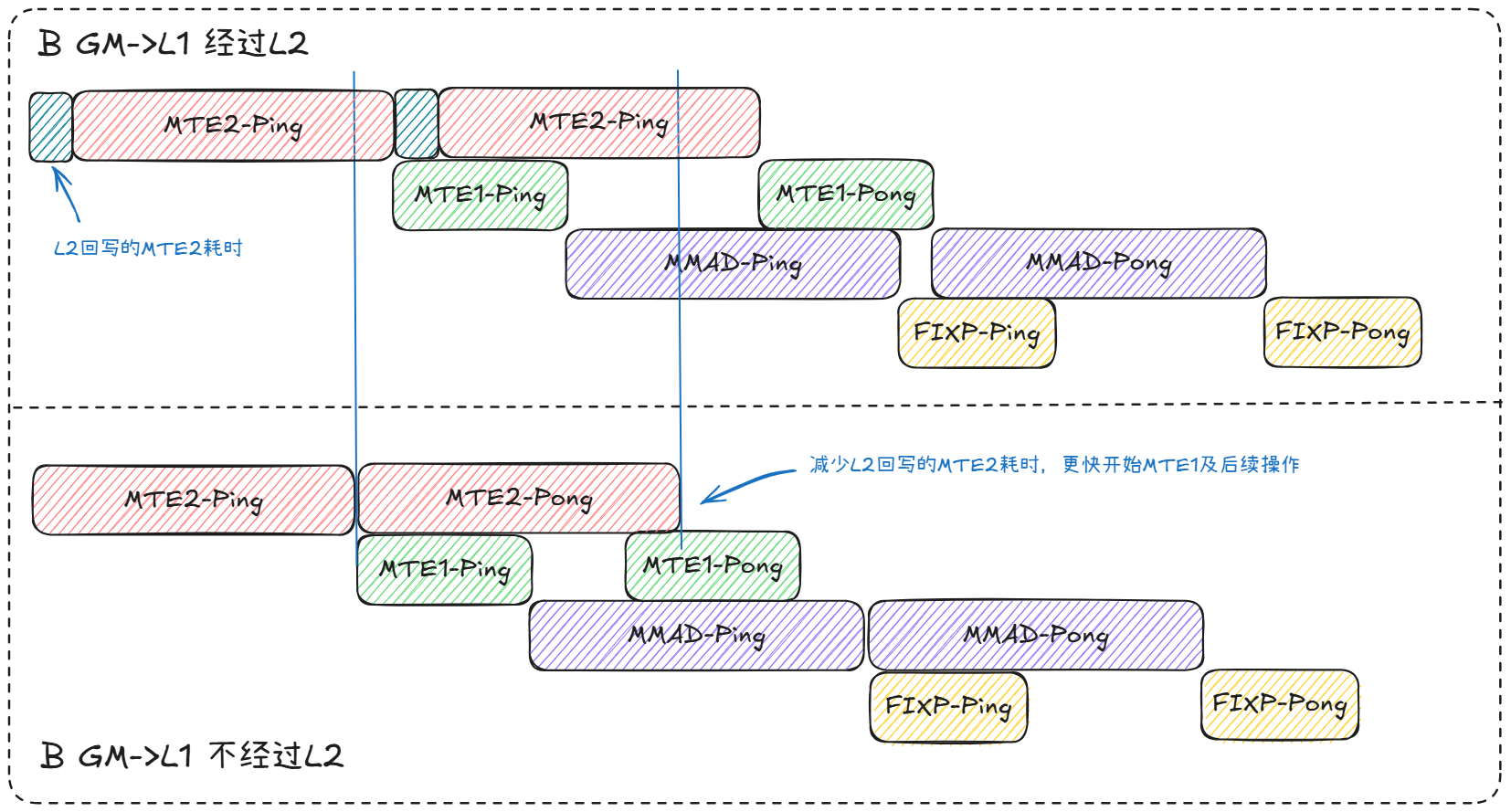
当前实验环境为Ascend950PR, GM带宽1.6T/s,32核。
E=48,M轴分组,group_list={256,256,…,256},M=12288,K=2048,N=5120
输入A 24MB,输入B 480MB,输出120MB,baseM=256,baseN=256,每份专家从GM加载只使用一次,如果将输入B加载进L2,输出极大概率回写到L2。
注:在单算子性能测试中,L2 缓存初始为空,小规模算例的 weight 数据即便加载至 L2,整体数据量也不会超过 L2 容量,因此性能表现保持稳定。而在整网环境下,L2 缓存中已存在脏数据区域,此时即使算子的输入输出总和未超出 L2 容量,也大概率会因 L2 数据回写至 GM 而导致 MTE2 性能劣化。
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 无双页表 | 458.426 | 314.602 | 0.687 | 53.674 | 0.117 | 105.023 | 0.229 | 451.33 | 0.986 | 176.431 | 0.385 |
| 有双页表 | 427.128 | 313.737 | 0.736 | 53.958 | 0.127 | 105.515 | 0.247 | 420.085 | 0.985 | 169.479 | 0.398 |
3.5 2-Buffer VS 3-Buffer
Double Buffer使用两个缓冲区交替工作:一个缓冲区用于当前计算,另一个并行准备下一轮数据。通过计算与数据加载/准备的重叠,隐藏内存访问延迟,减少流水线停顿,提高算子吞吐量。
- Double Buffer(2-Buffer) vs 3-Buffer
- 2-Buffer:两份buffer交替,覆盖“当前计算/下一轮准备”的基本重叠关系,资源开销更小。
- 3-Buffer:相较2-Buffer,3-Buffer仅在L1侧增加第三份阶段缓冲(A/B数据),L0层级仍为2-Buffer,以减少因搬运抖动、带宽瞬时不足造成的断流风险。
- 使能3-Buffer条件:需满足L1容量约束,在保持
baseM/baseN/baseK块大小后不引入新的瓶颈。当前GMM MX 3-Buffer需要满足:A1 + B1 + scaleA + scaleB + A3 <= HALF_L1_SIZEA2 + B2 + scaleA + scaleB + B3 <= HALF_L1_SIZE
其中,A1=A2=A3,B1=B2=B3,A1/B1分别为A/B一次MTE2搬运到L1的数据量。注意3-Buffer中第三份缓冲会引起L1 bank conflict,在Mem bound时有收益。
打满带宽的一条MTE2的数据量需为64KB,MX需要将A/B/scaleA和scaleB搬进L1,原始data和scale矩阵的数据量约为32:1,且host无法获取group_list里具体的值,因此一般按照A矩阵的原始矩阵的M来计算baseM,GMM MX最多支持3-Buffer。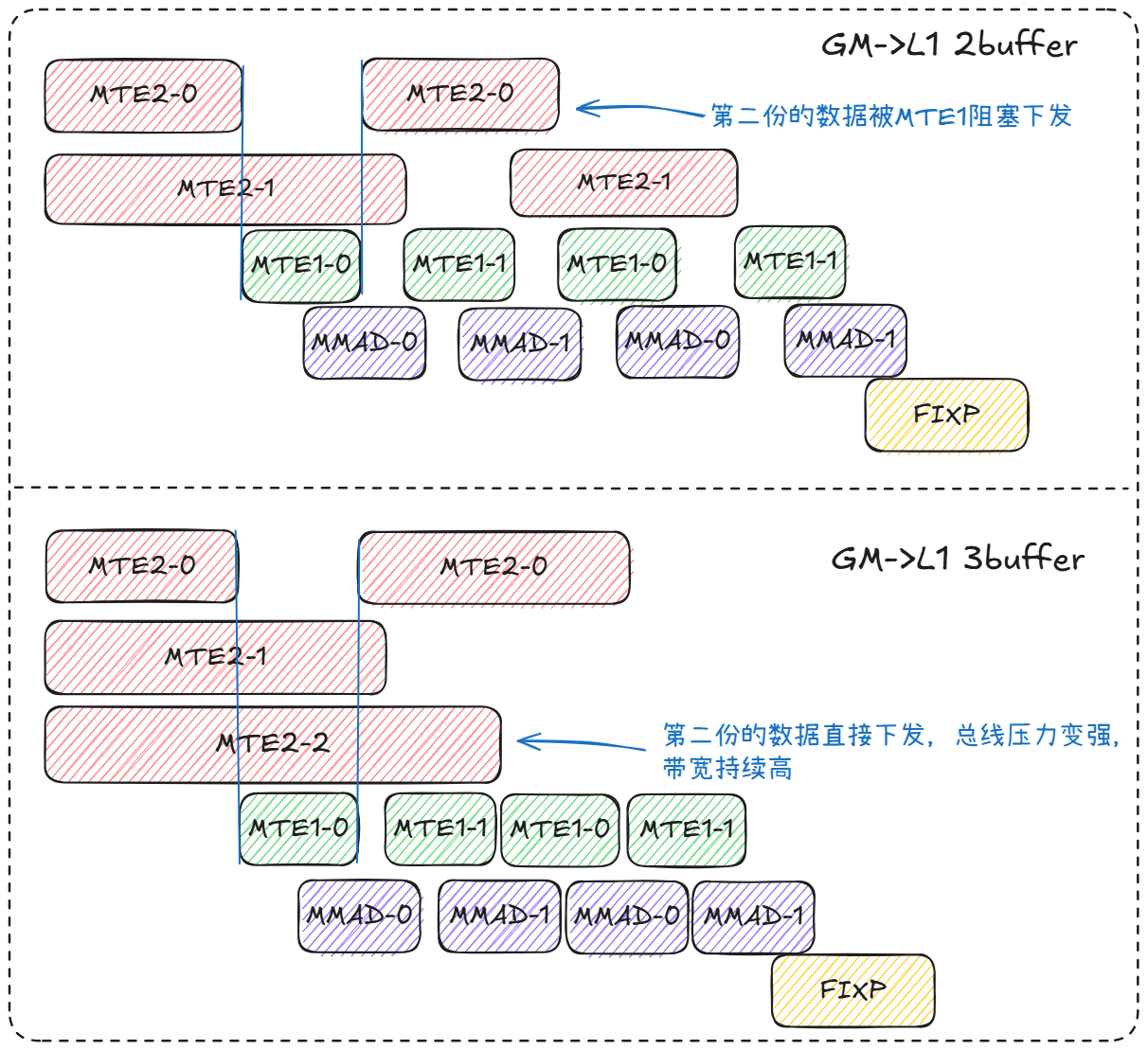
当前实验环境为Ascend950DT, GM带宽4T/s,32核。
以下均为MXFP8 ND场景的在不同shape下的实验结果:
- E=6,group_list={1,1,1,1,1,1},M=32,K=3584,N=2560,MEM bound,收益场景
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2Buffer | 22.654 | 5.314 | 0.239 | 6.689 | 0.301 | 6.923 | 0.311 | 19.255 | 0.866 | 3.55 | 0.16 |
| 3Buffer | 21.746 | 5.354 | 0.251 | 7.379 | 0.346 | 7.518 | 0.352 | 17.964 | 0.841 | 3.117 | 0.146 |
- E=3,group_list={10,10,10}, M=2048,K=2048,N=5120,MEM bound,收益场景
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2Buffer | 12.796 | 3.1 | 0.247 | 4.47 | 0.356 | 4.003 | 0.319 | 10.572 | 0.842 | 3.628 | 0.23 |
| 3Buffer | 12.371 | 3.177 | 0.262 | 4.691 | 0.386 | 4.441 | 0.366 | 10.15 | 0.836 | 3.26 | 0.26 |
- E=2,group_list={2048,2048},M=4096,K=2048,N=5120,CUBE bound,非收益场景
使能3-Buffer性能整体无收益,MTE2有预期收益,但是MTE1因为3-Buffer增加的L1 Bank Conflict而劣化。
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2Buffer | 106.745 | 101.48 | 0.956 | 19.934 | 0.188 | 34.753 | 0.327 | 91.753 | 0.864 | 55.291 | 0.521 |
| 3Buffer | 106.98 | 101.466 | 0.952 | 20.373 | 0.191 | 37.513 | 0.352 | 89.596 | 0.84 | 56.141 | 0.527 |
- E=8,group_list={4096,4096,4096,4096,4096,4096,4096,4096},M=32768,K=4096,N=7168,CUBE bound,非收益场景
超大shape时,因3-Buffer多增加的scalar和L1 bank conflict导致scalar和MTE1明显增加,而劣化的单流水在Ascend950上能被CUBE计算掩盖,算子性能持平。
| dur(us) | mac_t | mac_r | scalar_t | scalar_r | mte1_t | mte1_r | mte2_t | mte2_r | fixp_t | fixp_r | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2Buffer | 2245.45 | 2238.978 | 0.997 | 377.817 | 0.168 | 776.054 | 0.346 | 1788.711 | 0.797 | 618.712 | 0.276 |
| 3Buffer | 2245.647 | 2239.781 | 0.998 | 401.602 | 0.179 | 826.549 | 0.368 | 1789.974 | 0.797 | 621.594 | 0.277 |
4 总结
本文在阐述GMM算子计算逻辑与NPU MX矩阵乘实现原理的基础上,系统梳理了GMM核心的性能优化实践并进行了相应分析。
算子开发优秀实践建议:
- scalar优化:非必要不更新,精简计算与判断,复用偏移,常量优先
- 负载均衡:核不空闲,每核计算量尽可能均衡
- 提升搬运效率:高L2命中率,私有格式搬运,避免不必要的L2回写,搬运指令猛发
5 附录
5.1 几组MXFP8典型KN的MBU和MFU
E=6,全ND,M轴分组,group_list = {m,m,…},M = E * m,{K, N}={2048, 7168},{7168, 2048},{4096, 3072},{1536, 4096},{4096, 4096},{4096, 7168},{7168,4096}。
当前实验环境为Ascend950PR, GM带宽1.6T/s,32核。
5.1.2 MBU:Memory Bandwidth Utilization(内存带宽利用率)
MBU意在获取算子的GM带宽利用率,并且假定GM读写数据量大小为输入和输出之和。在MX场景下,还需额外考虑两个缩放因子(scale)的输入数据量。
- 普通MBU公式:
mbu = ( M × K ) × sizeof A + ( E × N × K ) × sizeof B + ( M × N ) × sizeof C duration × B W G M \text{mbu} = \frac{(M \times K) \times \text{sizeof}_A + (E \times N \times K) \times \text{sizeof}_B + (M \times N) \times \text{sizeof}_C }{\text{duration} \times BW_{GM}} mbu=duration×BWGM(M×K)×sizeofA+(E×N×K)×sizeofB+(M×N)×sizeofC - MX MBU公式:
mbu = ( M × K ) × sizeof A + ( E × N × K ) × sizeof B + ( M + N ) × K / 32 + ( M × N ) × sizeof C duration × B W G M \text{mbu} = \frac{(M \times K) \times \text{sizeof}_A + (E \times N \times K) \times \text{sizeof}_B + (M + N) \times K / 32 + (M \times N) \times \text{sizeof}_C}{\text{duration} \times BW_{GM}} mbu=duration×BWGM(M×K)×sizeofA+(E×N×K)×sizeofB+(M+N)×K/32+(M×N)×sizeofC
其中, d u r a t i o n duration duration是算子耗时(单位:us),分子为输入输出的大小(单位:B), GM带宽 B W G M = 1.6 × 10 6 BW_{GM} = 1.6 \times 10^6 BWGM=1.6×106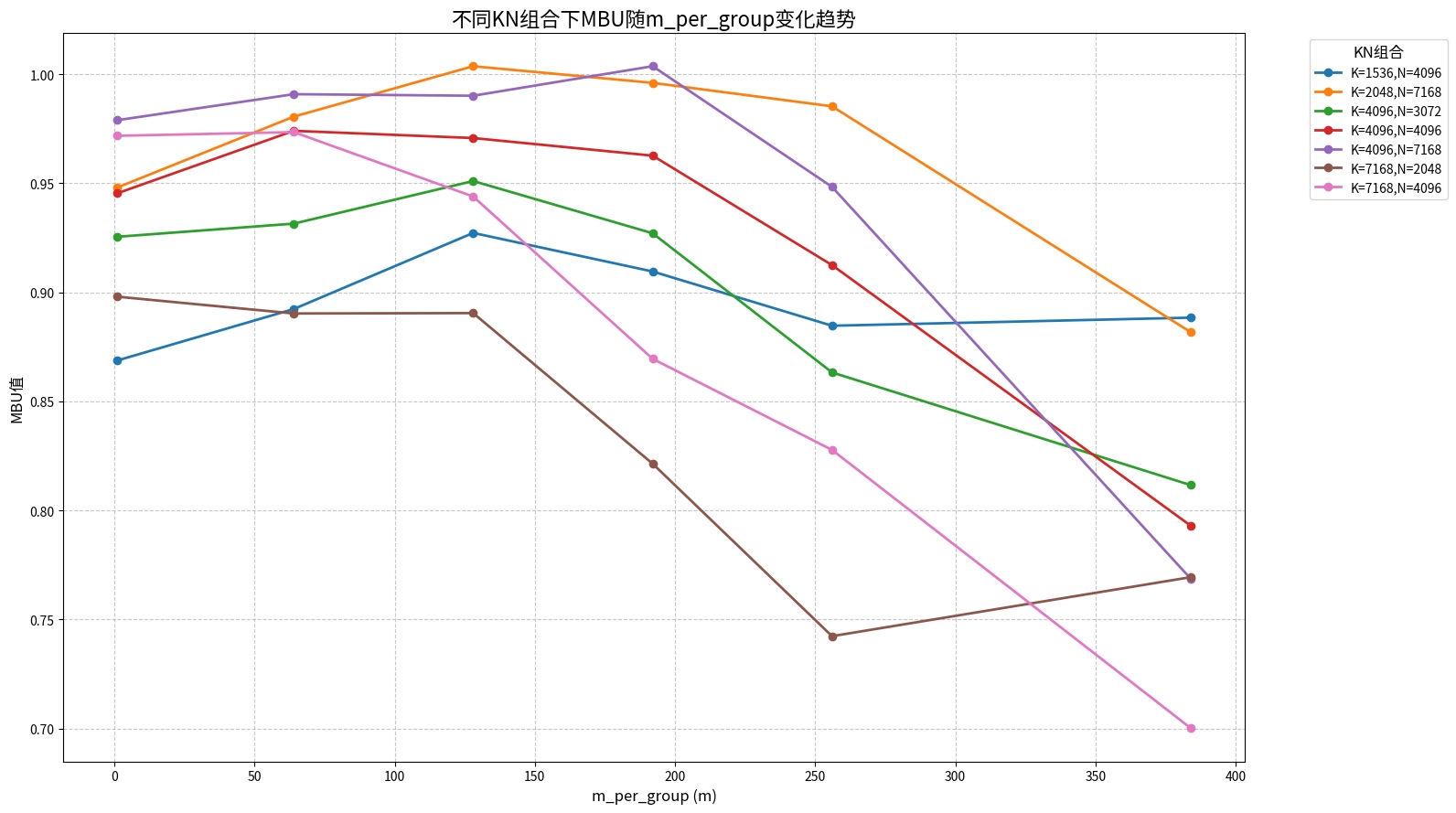
在算子实际实现中,输出 L2 缓存的相关参数并未被显式控制。若输出数据能够完全容纳于L2缓存中,则无需再从L2写回GM。
上图两个异常现象的解释:
- 当 K=7168、N=2048 时,m=384 对应的 MBU 优于 m=256。原因在于单算子测试中,两种情形下的输出数据均未超出 L2 容量(即无需写回 GM),且 m=384 时 B 矩阵的L2命中率更高,因此算子耗时与 m 不呈线性增长。
- MBU值超过1,是由于在单算子测试中输出数据存放于L2缓存内,且L2带宽(5.2 T/s)远高于当前实验环境中的 GM 带宽(1.6 T/s)。
因此,若希望评估MBU,建议采用m=1的配置,此时可基本消除L2对输入与输出的影响。
5.1.3 MFU:Model FLOPs Utilization(模型浮点运算利用率)
MFU 是衡量芯片算力是否被有效利用的关键指标。
- MFU公式:
mfu = M × K × N × 2 duration × TFLOPS \text{mfu} = \frac{M \times K \times N \times 2}{\text{duration} \times \text{TFLOPS}} mfu=duration×TFLOPSM×K×N×2
其中, d u r a t i o n duration duration是算子耗时(单位:us),分子为理论的矩阵乘加总数, T F L O P S TFLOPS TFLOPS是理论算力值,在此实验环境上8bit矩阵乘该值为865T。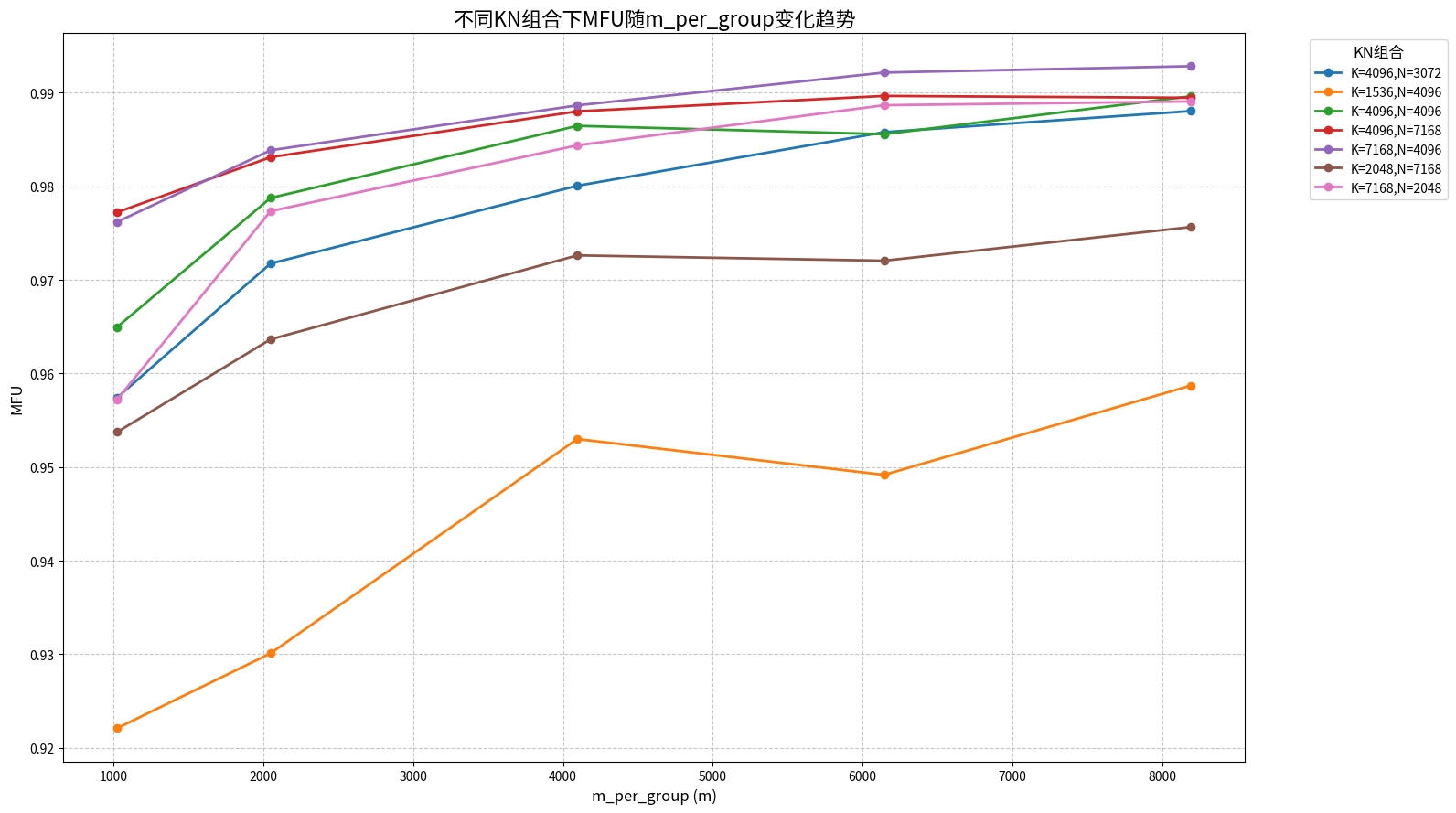
对于所有 (K, N) 组合,MFU 值随 m 增大总体呈稳定上升趋势。其中,K=7168、N=4096与K=4096、N=7168这两个大shape组合的 MFU值始终处于最高区间(最高可至 99.5%)。个别数据点因L2缓存行为的影响,MFU值出现轻微下降。
5.2 cann-samples相关资源
- 性能优化指南:Samples/2_Performance/grouped_matmul_story/docs/quant_grouped_matmul_mx_performance.md
- MXFP8样例代码:Samples/2_Performance/grouped_matmul_story/grouped_matmul_recipes/examples/quant_grouped_matmul_mxfp8
- MXFP4样例代码:Samples/2_Performance/grouped_matmul_story/grouped_matmul_recipes/examples/quant_grouped_matmul_mxfp4
我们希望样例能够帮助开发者快速掌握GMM MX矩阵乘的优化方法,也期待社区的反馈与建议。如有问题,欢迎在cann-samples issue提出。

鲲鹏昇腾开发者社区是面向全社会开放的“联接全球计算开发者,聚合华为+生态”的社区,内容涵盖鲲鹏、昇腾资源,帮助开发者快速获取所需的知识、经验、软件、工具、算力,支撑开发者易学、好用、成功,成为核心开发者。
更多推荐


 3
3 0
0- 0



 已为社区贡献106条内容
已为社区贡献106条内容

所有评论(0)