
榨干Ascend 310P算力:基于vLLM与DVPP的端侧多模态巡检机器人
本文介绍了基于昇腾芯片的机场跑道智能巡检机器人项目"昇腾智驭"。该系统采用云边协同架构,通过STM32F407实现高频控制,Ascend 310P处理导航和AI推理。关键技术包括:1) 全硬件零拷贝视觉流水线,利用DVPP等硬件单元实现高效图像处理;2) 在8G显存上部署Qwen-VL-Int4视觉大模型,结合vLLM实现端侧语义认知;3) 基于EKF的多传感器融合导航方案,定
🎯 0. 前言:为什么要做这个项目?
今天和大家分享一个我近期主导的硬核技术实践项目——“昇腾智驭”机场跑道智能巡检机器人。
在传统的机场跑道异物(FOD)巡检中,高度依赖人工排查,不仅效率低下,而且面对毫米级的微小异物极易漏检。更头疼的是,传统的目标检测模型(如 YOLO)只能告诉你“这里有个东西”,却无法告诉你“这是什么材质、危险程度多高”。
为了打破这个僵局,我们基于国产算力生态(Ascend 310P / Atlas A2),打造了一台具备**“极速视觉感知 + 端侧多模态认知 + 高精融合导航”**的全自主具身智能底盘。
本文将重点拆解该项目中的三大核心技术壁垒,毫无保留地分享在显存和算力受限的边缘端,如何实现全链路的极限优化。
🚀 1. 架构总览:云边协同,端侧主导
为了实现高频实时的姿态控制与深度的语义认知,系统采用了非对称的异构架构:
- 小脑(底层控制):基于 STM32F407,通过 CAN-FD 高速总线实现 1kHz 级别的高频闭环姿态控制与传感器(IMU、编码器)数据汇聚。
- 大脑(边缘中枢):基于 Ascend 310P 算力板卡,统筹 ROS 2 分布式导航通信、DVPP 硬件图像预处理与 vLLM 大模型推理。

⚡ 2. 极速感知:全硬件零拷贝(Zero-Copy)视觉流水线
在边缘端处理 1080P 视频流时,如果用传统的 OpenCV读流 -> Resize -> 模型推理,CPU 占用率会瞬间飙升到 100%。
为了彻底释放 CPU 算力,我们深度榨干了昇腾芯片内部的纯硬件图像处理单元,打通了一条全硬件零拷贝的流水线:
- V4L2 裸流捕获:直接从摄像头拉取 MJPEG 数据流。
- DVPP / JPEGD 硬件解码:微秒级将压缩流解成 YUV 裸数据。
- DVPP / VPC 硬件缩放抠图:无需 CPU 干预,瞬间将画面缩放至 YOLO 所需的
640x640,并完成感兴趣区域(ROI)抠图。 - AIPP 硬件色域转换:在数据流入 NPU (AI Core) 的瞬间,由 AIPP 硬件模块完成
YUV420SP -> RGB的转换与归一化(1/255)。
💡 避坑指南: DVPP 处理后的图像有严格的 宽16对齐、高2对齐 限制。我们通过在 ATC 模型编译阶段静态注入 AIPP 配置文件 (aipp.cfg),完美裁剪了对齐产生的无效黑边,保障了 YOLOv8-FOD 改进模型 86.9% 的高精度检测。
🧠 3. 认知跃迁:在 8G 显存上跑通端侧 VLM (vLLM + Qwen-VL)
这是本项目最亮眼、也是最折腾的部分。YOLO 只能框出异物,但塔台需要知道异物是金属螺母还是塑料袋。我们在边缘端引入了视觉大语言模型(VLM)。
要在 Ascend 310P 有限的显存上跑起大模型,我们打出了两套组合拳:
① Int4 极限压缩
采用 Qwen-VL-Int4 模型,将原本需要十几 G 显存的权重硬生生压到了 5.8GB 左右,极大缓解了 Memory Bound(访存瓶颈)。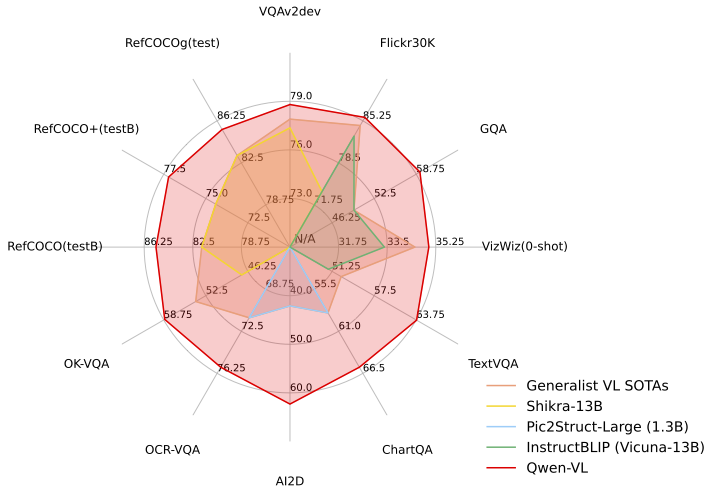
https://www.modelscope.cn/models/ccyh123/Qwen-VL-Chat-Int4/
② vLLM 与 PageAttention 显存魔术
摒弃了传统的 PyTorch 原生推理框架,全面拥抱 vLLM。通过引入操作系统中“虚拟内存分页”的思想,PageAttention 机制将 KV Cache 按块(Block)进行非连续分配。
https://docs.vllm.ai/projects/vllm-ascend-cn/zh-cn/latest/

- 效果测试:显存碎片率从原本的 40% 骤降至极低水平;在多路并发图片请求下,吞吐量提升至 18 tokens/s。
交互逻辑演示:
当前端 YOLO 抠出异物图片后,直接喂给本地部署的 Qwen-VL 服务:
# 伪代码:端侧 VLM 请求逻辑
prompt = "你是一个机场安全专家。请识别图中异物的材质,并评估其对飞机轮胎卷入的风险等级(高/中/低)。"
response = vllm_engine.generate(prompt, image=cropped_fod_image)
# 输出示例:{"材质": "生锈金属螺母", "风险等级": "高", "建议": "立即清理"}
单图认知延迟控制在 <1.2s,彻底完成了从“视觉感知”向“认知智能”的降维打击!
🗺️ 4. 融合导航:基于 EKF 的抗差状态估计
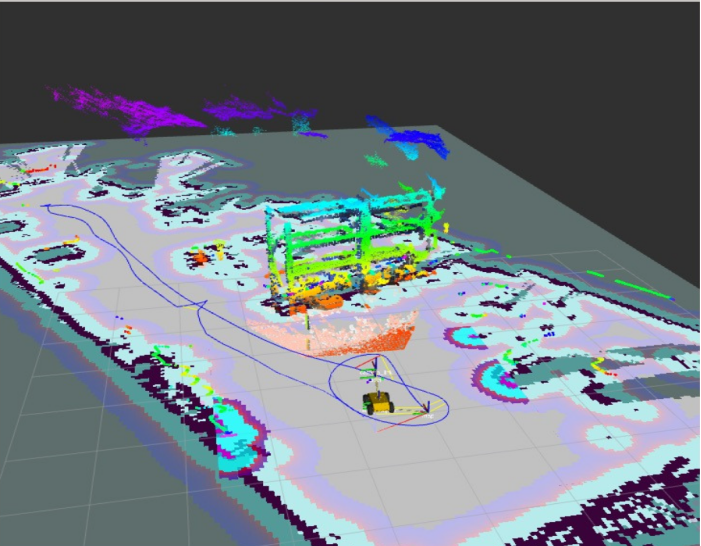
机场跑道极其空旷,特征点稀疏,单纯依靠视觉或激光雷达 SLAM 极易发生长距离漂移。
在 ROS 2 的导航栈中,我们重写了底层里程计节点,设计了基于 扩展卡尔曼滤波(EKF) 的多传感器融合框架:
- 融合 1kHz 的 IMU 姿态与高频轮式里程计。
- 创新点:引入 GM(1,1) 灰色预测模型,对高噪的 RFID 绝对坐标信号进行抗差处理,将其作为高维观测约束。
- 实测数据:在长距离高速巡检中,全局定位误差被死死钉在 <60cm,保障了异物世界上报坐标的绝对精准。
总结与展望
“昇腾智驭”不仅是一台跑道巡检车,它验证了**“国产底层硬件加速 + 前沿大模型推理优化 + 经典机器人数理建模”**全栈融合的巨大潜力。这套架构完全可以无缝迁移到智慧矿山、无人工厂等泛工业场景。
技术无止境,如果你对 DVPP 的底层内存管理,或者 vLLM 在昇腾设备上的编译部署细节感兴趣,欢迎在评论区交流讨论!

鲲鹏昇腾开发者社区是面向全社会开放的“联接全球计算开发者,聚合华为+生态”的社区,内容涵盖鲲鹏、昇腾资源,帮助开发者快速获取所需的知识、经验、软件、工具、算力,支撑开发者易学、好用、成功,成为核心开发者。
更多推荐
 12
12 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)