
mean triton确定性算子适配
作者:昇腾实战派
1、背景概述
在深度学习中,算子的确定性计算对于确保模型训练和推理的可复现性至关重要。然而,许多算子(如均值计算算子)在默认实现下可能存在非确定性问题,尤其是在float32数据类型上,这是由于浮点数计算不满足结合律,导致多核并行计算顺序不一致引入的数值偏差。本文以mean算子为例,系统性地复现了其在GPU和NPU上的非确定性计算问题,对比了确定性实现与非确定性实现的性能差异,并探索了通过Triton框架在NPU上的适配与优化策略。实验表明,确定性实现能消除结果波动,但会带来显著的性能开销,为实际应用中的需要进行权衡。
repo仓库链接:https://github.com/thinking-machines-lab/batch_invariant_ops
2、确定性问题复现
首先依据官方给出的操作步骤复现该算子的确定性计算问题。
a) 安装batch_invariant_ops库
git clone https://github.com/thinking-machines-lab/batch_invariant_ops
pip install -e .
b) 改写测试脚本
原仓中的测试用例test_batch_invariance.py,提供了matmul算子的确定性结果演示;为复现mean算子的问题,需要进行一些改写,代码如下:
import torch
from batch_invariant_ops import set_batch_invariant_mode
device_type = getattr(torch.accelerator.current_accelerator(), "type", "cpu")
print(device_type)
torch.set_default_device(device_type)
# Just to get the logging out of the way haha
with set_batch_invariant_mode(True):
pass
def test_batch_invariance(dtype=torch.float32):
B, D, X = 2048, 4096, 16
a = torch.linspace(-100, 100, B*D*X, dtype=dtype).reshape(B, D, X)
# Method 1: vector multiplication (batch size 1)
out1 = torch.mean(a[:1], dim=1, keepdim=False)
# Method 2: Matrix multiplication, then slice (full batch)
out2 = torch.mean(a, dim=1, keepdim=False)[:1]
# Check if results are identical
diff = (out1 - out2).abs().max()
return diff.item() == 0, diff
def run_iters(iters=10):
for dtype in [ torch.float32 , torch.bfloat16 ]:
is_deterministic = True
difflist = []
for i in range (iters):
isd, df = test_batch_invariance(dtype)
is_deterministic = is_deterministic and isd
difflist.append(df)
print( f"Batch Deterministic: {is_deterministic} run-to-run max/min/diff {max(difflist)}/{min(difflist)}/{max(difflist)-min(difflist)} for {dtype} in {iters} iterations")
# Test with standard PyTorch (likely to show differences)
# shows that: in standard mode, the results may have some diffs
print("Standard PyTorch:")
with set_batch_invariant_mode(False):
run_iters()
# Test with batch-invariant operations
print("\nBatch-Invariant Mode:")
with set_batch_invariant_mode(True):
run_iters()
# shows that: in batch_invariant mode,the results are all the same该示例设置输入尺寸为(2048,4096, 16);为全面评测算子性能,需要覆盖更多输入场景。运行结果如下:
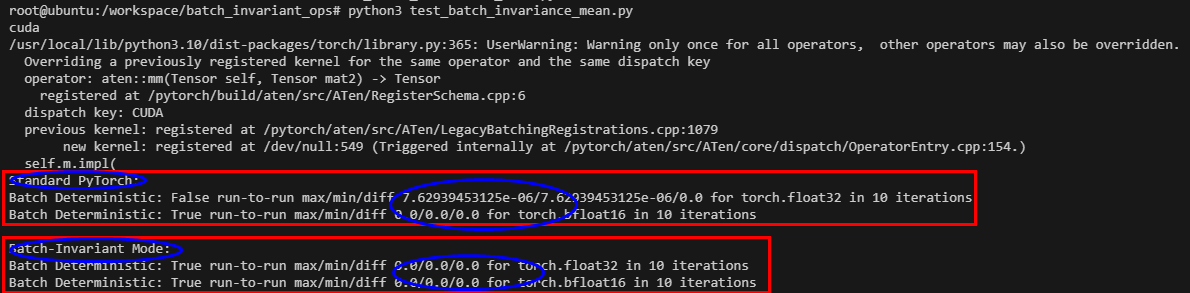
可以看到,在pytorch标准模式下,对于float32数据格式出现了不确定性计算的问题;而在batch-invariant mode下,float32数据格式下计算结果是确定的。
——值得一提的是:在bfloat16数据格式下,两种模式下的计算结果都是确定的。
c) 性能差异比较
一般来说,为了实现确定性计算,需要牺牲一些性能。那么,对于该算子确定性实现和非确定性实现之间的性能差异有多大呢?
import torch
import triton
import triton.language as tl
@triton.jit
def mean_kernel(
input_ptr,
output_ptr,
input_stride0,
input_stride1,
input_stride2,
output_stride0,
output_stride1,
M, # size before reduction dim
N, # size of reduction dim
K, # size after reduction dim
BLOCK_SIZE: tl.constexpr,
):
"""
Kernel for computing mean along a single dimension.
Input is viewed as (M, N, K) where N is the dimension being reduced.
"""
# Program ID gives us which output element we're computing
pid = tl.program_id(0)
# Compute output indices
m_idx = pid // K
k_idx = pid % K
# Bounds check
if m_idx >= M or k_idx >= K:
return
# Accumulate sum across reduction dimension
acc = 0.0
for n_start in range(0, N, BLOCK_SIZE):
n_offsets = n_start + tl.arange(0, BLOCK_SIZE)
mask = n_offsets < N
# Calculate input indices
input_idx = m_idx * input_stride0 + n_offsets * input_stride1 + k_idx * input_stride2
# Load and accumulate
vals = tl.load(input_ptr + input_idx, mask=mask, other=0.0)
acc += tl.sum(vals)
# Compute mean and store
mean_val = acc / N
output_idx = m_idx * output_stride0 + k_idx * output_stride1
tl.store(output_ptr + output_idx, mean_val)
def mean_dim(
input: torch.Tensor, dim: int, keepdim: bool = False, dtype: torch.dtype | None = None
) -> torch.Tensor:
"""
Triton implementation of torch.mean with single dimension reduction.
Args:
input: Input tensor
dim: Single dimension along which to compute mean
keepdim: Whether to keep the reduced dimension
dtype: Output dtype. If None, uses input dtype (or float32 for integer inputs)
Returns:
Tensor with mean values along specified dimension
"""
# Validate inputs
assert input.is_cuda, "Input must be a CUDA tensor"
assert -input.ndim <= dim < input.ndim, (
f"Invalid dimension {dim} for tensor with {input.ndim} dimensions"
)
# Handle negative dim
if dim < 0:
dim = dim + input.ndim
# Handle dtype
if dtype is None:
if input.dtype in [torch.int8, torch.int16, torch.int32, torch.int64]:
dtype = torch.float32
else:
dtype = input.dtype
# Convert input to appropriate dtype if needed
if input.dtype != dtype:
input = input.to(dtype)
# Get input shape and strides
shape = list(input.shape)
# Calculate dimensions for kernel
M = 1
for i in range(dim):
M *= shape[i]
N = shape[dim]
K = 1
for i in range(dim + 1, len(shape)):
K *= shape[i]
# Reshape input to 3D view (M, N, K)
input_3d = input.reshape(M, N, K)
# Create output shape
if keepdim:
output_shape = shape.copy()
output_shape[dim] = 1
else:
output_shape = shape[:dim] + shape[dim + 1 :]
# Create output tensor
output = torch.empty(output_shape, dtype=dtype, device=input.device)
# Reshape output for kernel
if keepdim:
output_2d = output.reshape(M, 1, K).squeeze(1)
else:
output_2d = output.reshape(M, K)
# Launch kernel: in npu: you must limit that the max_grids is 48
grid = (M * K,)
BLOCK_SIZE = 1024
mean_kernel[grid](
input_3d,
output_2d,
input_3d.stride(0),
input_3d.stride(1),
input_3d.stride(2),
output_2d.stride(0),
output_2d.stride(1) if output_2d.ndim > 1 else 0,
M,
N,
K,
BLOCK_SIZE,
)
return output
if __name__=="__main__":
import torch
import time
torch.rand(42)
device_type = getattr(torch.accelerator.current_accelerator(), "type", "cpu")
print(device_type)
torch.set_default_device(device_type)
repreat_num = 100
warmup_time = 3
#1. construct input
B, D, X = 2048, 4096, 16
input = torch.linspace(-100, 100, B*D*X, dtype = torch.float32).reshape(B, D, X)
#2. run, get profiling data
for i in range(warmup_time):
output = mean_dim(input, dim=1, keepdim=False)
start = time.time()
for i in range(repreat_num):
output = mean_dim(input, dim=1, keepdim=False)
torch.cuda.synchronize()
end = time.time()
print("the time elapsed for shape {}, {} is {}ms".format(B, D, (end - start) * 1000 / repreat_num))
#3. compare with torch implementation
for i in range(warmup_time):
output = torch.mean(input, dim=1, keepdim=False)
start = time.time()
for i in range(repreat_num):
output = torch.mean(input, dim=1, keepdim=False)
torch.cuda.synchronize()
end = time.time()
print("for torch implementation, the time elapsed for shape {}, {} is {}ms".format(B, D, (end - start) * 1000 / repreat_num))
可以看到,对于(2048,4096,16)这种输入shape来说,mean确定性计算的实现耗时会大大增加,性能约为非确定性实现的1/3。GPU卡型号为96G H20
d) NPU下问题是否存在
在NPU下,是否存在类似问题, 即Ascend-C算子是否实现了确定性计算呢? 实验如下:
import torch
from batch_invariant_ops import set_batch_invariant_mode
device_type = getattr(torch.accelerator.current_accelerator(), "type", "cpu")
print(device_type)
torch.set_default_device(device_type)
def test_batch_invariance(dtype=torch.float32):
B, D, X = 2048, 4096, 16
a = torch.linspace(-100, 100, B*D*X, dtype=dtype).reshape(B, D, X)
# Method 1: Matrix-vector multiplication (batch size 1)
out1 = torch.mean(a[:1], dim=1, keepdim=False)
# Method 2: Matrix-matrix multiplication, then slice (full batch)
out2 = torch.mean(a, dim=1, keepdim=False)[:1]
# Check if results are identical
diff = (out1 - out2).abs().max()
return diff.item() == 0, diff
def run_iters(iters=10):
for dtype in [ torch.float32 , torch.bfloat16 ]:
is_deterministic = True
difflist = []
for i in range (iters):
isd, df = test_batch_invariance(dtype)
is_deterministic = is_deterministic and isd
difflist.append(df)
print( f"Batch Deterministic: {is_deterministic} run-to-run max/min/diff {max(difflist)}/{min(difflist)}/{max(difflist)-min(difflist)} for {dtype} in {iters} iterations")
# Test with standard PyTorch (likely to show differences)
# shows that: in standard mode, the results may have some diffs
print("Standard PyTorch:")
with set_batch_invariant_mode(False):
run_iters()
可以看到,在NPU上,非确定性计算的问题也会存在,且只会出现在float32数据类型上。
2、NPU适配
该repo下的算子均为triton实现,因此在NPU下的适配可以走triton-ascend适配路径。当然,也可以用Ascend-C去实现一版确定性的mean计算,该实现方式不在本文讨论范围内。
a) 安装triton-ascend
目前官方提供daily包,采用daily包安装方式,找到对应的安装命令:
pip install -i https://test.pypi.org/simple/ triton-ascend==3.2.0.dev2025112001daily包查询路径:https://test.pypi.org/project/triton-ascend/3.2.0.dev2025112001/#history
b) 适配跑通
安装triton-ascend之后,后续的triton操作默认都是执行在npu上;无需额外import triton-ascend。
triton-ascend期望达到的适配效果是仅需修改少量代码,即可完成算子的NPU适配,对于上面的代码,需要做如下几处适配修改,如下图所示:
- 导入torch_npu

- torch.cuda -> torch.npu

运行测试脚本,结果如下:
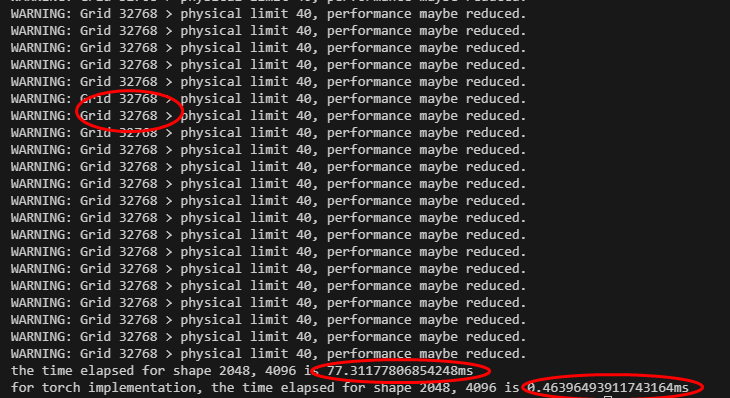
可以看到算子可以正常运行,不过提示Grid数过多,物理限制为40个,可能导致性能下降。 实际的耗时结果如下:
| triton实现(确定) | Ascend-C实现(非确定) | 耗时比例 |
| 77.31ms | 0.46ms | 168x |
c) 性能优化
确定性计算的实现思想是把规约操作尽量放在单核上进行,避免多核执行顺序不一致以及float数据类型不满足结合律特性引入不确定性。结合WARN提示,和代码实现逻辑来看,Grid设置太大,超过了物理核的实际个数,会
引入较大的开销。 因此结合该算子的实现,可以设计如下几种优化思路:
- 每个Grid对应M轴;
- 每个Grid对应K轴;
- 若M轴很大,则Grid设为40,每个Grid处理M轴多行;
- 若K轴很大,则Grid设为40,每个Grid处理K轴多列;
- 输入进行reshape,变换为(M,K,N); 使要处理的数据位于尾轴;
- 对Block_Size进行优选
详细实验结果如下所示:
| 序号 | triton确定性 | Ascend-C非确定性 | Grid数 | 耗时比 | 分析 |
| 每个Grid对应M轴 | 45.69 | 0.467 | 2048 | 97.83X | 逻辑Grid数 》物理核数,引入较大开销;存在进一步优化空间;相较于之前的32768,grid数已大大减少 |
| 每个Grid对应K轴 | 226.12 | 0.468 | 16 | 484.20X | 1. 物理核数未打满;2. K轴数据存储不连续,数据读取耗时会比较大 |
| Grid设为40,每个Grid处理M轴离散多行 | 46.17 | 0.468 | 40 | 98.65X | 逻辑核降到40,略有上升,why? |
| Grid设为40,每个Grid处理M轴连续多行 | 46.07 | 0.468 | 40 | 98.44X | 逻辑核降到40,略有上升,why? |
| 输入reshape为(M,K,N); | 2.75 | 0.468 | 2048 | 5.87X | 数据处理发生在尾轴,因数据连续,读写开销会大幅减少 |
| 对Block_Size进行优选(512-》8192) | 1.78 | 0.468 | 2048 | 3.8X | 尽量增大UB使用大小,减小循环次数 |
| 2048 thread -> 40 thread | 1.80 | 0.468 | 40 | 3.84X | 将逻辑核降低到40,略有上升 |
| 合并为M * K, 均分到40thread处理 | 1.83 | 0.468 | 40 | 3.91X | 引入比较多的标量计算 |
3、总结
- GPU和NPU,Pytorch官方API, mean算子在float32数据类型下均存在不确定性计算问题,float16无该问题;
- NPU下也存在不确定性问题;
- GPU下采用triton实现的mean确定性计算算子,会导致算子性能下降为CUDA实现的1/3;
- 采用triton-ascend适配mean算子,算子性能下降幅度与GPU类似。
4、参考资料
https://lmsys.org/blog/2025-09-22-sglang-deterministic/
https://thinkingmachines.ai/blog/defeating-nondeterminism-in-llm-inference/
https://zhuanlan.zhihu.com/p/1956415532606665583
https://gitcode.com/Ascend/triton-ascend/blob/master/docs/HighPerformanceGuide.md

鲲鹏昇腾开发者社区是面向全社会开放的“联接全球计算开发者,聚合华为+生态”的社区,内容涵盖鲲鹏、昇腾资源,帮助开发者快速获取所需的知识、经验、软件、工具、算力,支撑开发者易学、好用、成功,成为核心开发者。
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)