
LeetCUDA学习记录(三)—— sigmoid算子代码实现详细解读
本文介绍了LeetCUDA中sigmoid算子的实现与优化。通过PyTorch C++/CUDA扩展实现了GPU加速的sigmoid函数,支持FP32和FP16精度,并提供了基础版、向量优化版等不同实现方案。文章详细说明了环境配置(针对3090显卡的调整)、代码结构(包括Python接口和CUDA内核),重点解读了性能测试函数的设计。该算子通过预热、多次迭代计时等机制,公平比较不同实现(如自定义优
LeetCUDA学习记录(三)—— sigmoid算子代码实现详细解读
- 🎓 一、环境配置安装
- 🚀 二、sigmoid算子代码解读
-
- 🏅 2.1 sigmoid算子代码结构
- 🀄️ 2.2 sigmoid.py代码解读
- 🌕 2.3 sigmoid.cu代码解读
-
- ⚡️ 2.3.1 头文件和宏定义
- 📉 2.3.3 FP32 类型Sigmoid算子的 CUDA 核函数实现
- 🔢 2.3.4 FP16 类型Sigmoid算子的 CUDA 核函数实现
-
- ✨ 2.3.4.1 基础版(单元素处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16_kernel)
- 🥦 2.3.4.2 SIMD优化版(2元素并行处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x2_kernel)
- 🥒 2.3.4.3 SIMD优化版(8元素并行处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x8_kernel)
- 🥔 2.3.4.4 SIMD优化版(8元素打包处理,进一步优化内存访问)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x8_pack_kernel)
- 🦭 2.3.5 把 CUDA kernel 封装成 PyTorch 可调用的扩展函数
- ⛪️ 三、小结
🎓 一、环境配置安装
🌵 1.1 环境配置和安装
有关环境配置和安装,以及具体gpu(如3090)上的编译错误问题,请参考博客:LeetCUDA学习记录(一)——elementwise算子代码实现详细解读
🍀 1.2 sigmoid算子运行体验
简介:sigmoid算子通过PyTorch C++/CUDA 扩展实现 GPU 加速的直方图统计。对应仓库难度:Easy⭐️
Sigmoid 函数是机器学习里常用的激活函数,能把任意实数输入压缩到 0 到 1 之间 —— 比如输入负数会输出接近 0 的数,输入正数会输出接近 1 的数,输入 0 时正好输出 0.5。它的核心作用是给模型输出 “概率感”,比如在二分类任务里,用 Sigmoid 输出的结果可以直接理解为 “属于某一类的概率”;同时也能让模型学到数据里的非线性关系,让复杂问题的拟合更精准。不过它也有小缺点,比如输入绝对值太大时容易出现 “梯度消失”,导致模型难训练,所以实际用的时候会结合场景和其他激活函数搭配。
笔者使用的是3090显卡,因此需修改sigmoid.py中的配置,在extra_cuda_cflags中添加以下项:
# new add, 添加针对不同 GPU 架构的编译选项
"-gencode=arch=compute_86,code=sm_86", # 3090
同时由于笔者在自己的conda环境中安装的是11.7版本的cuda,因此会提示找不到sigmoid.cu的#include <cuda_fp8.h>头文件。但笔者发现在实际实现过程中,并没有用到该头文件,因此笔者注释并加入根据cuda版本的判断逻辑,可以成功运行并且不影响运行结果。
// #include <cuda_fp8.h>
#if __CUDACC_VER_MAJOR__ >= 12
#include <cuda_fp8.h>
#endif
按照上面配置重新运行sigmoid.py程序:
CUDA_VISIBLE_DEVICES=1 python3 sigmoid.py
得到结果如下(更多结果已省略),可以看出已经正确执行: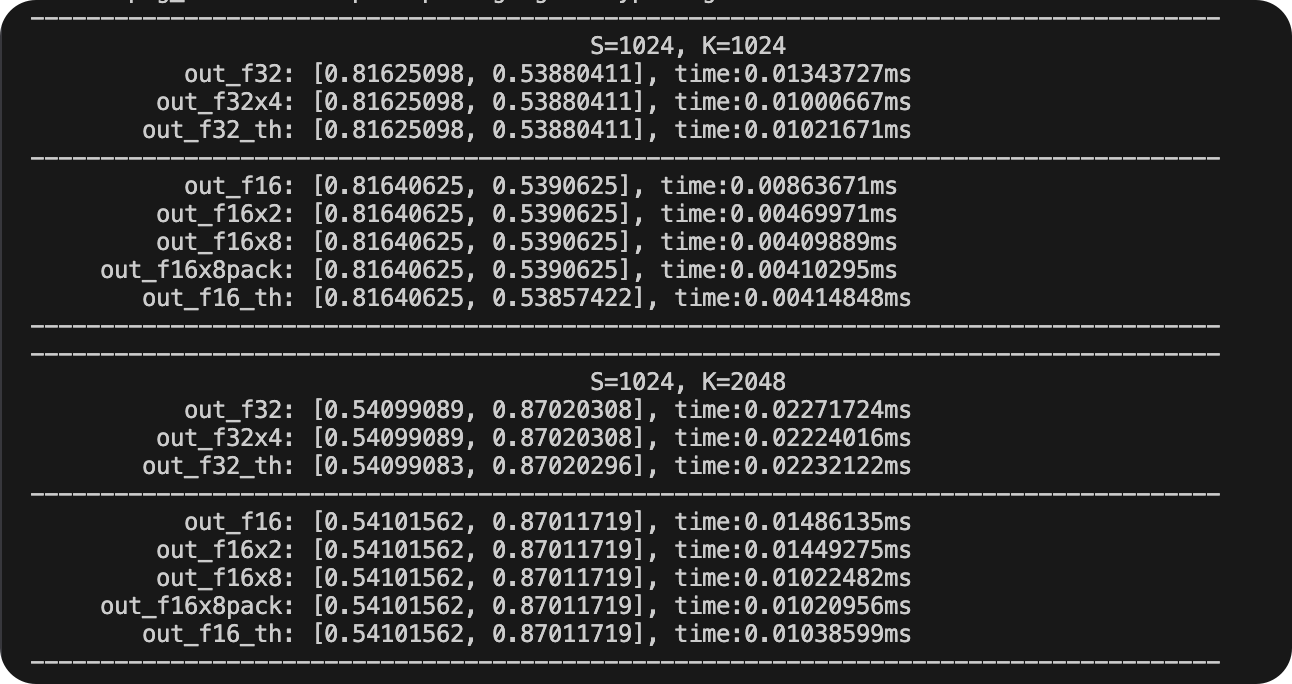
🚀 二、sigmoid算子代码解读
🏅 2.1 sigmoid算子代码结构
整个LeetCUDA sigmoid算子包括三部分文件:
sigmoid.py: 用 CUDA 实现了不同精度(FP32 单精度、FP16 半精度)和不同向量优化的 Sigmoid 算子核函数,还通过宏定义生成对应的 C++ 接口函数,最后绑定到 PyTorch 扩展模块,让 Python 能直接调用这些 GPU 加速的 Sigmoid 函数。sigmoid.cu: 加载自定义的 CUDA Sigmoid 算子模块,再定义一个基准测试函数(含预热、多次迭代计时,还会输出结果和平均耗时),接着遍历不同尺寸的输入张量(S 和 K 组合),分别对 FP32 精度和 FP16 精度(自定义基础版、2/8 元素优化版、8 元素打包优化版,以及 PyTorch 原生版)的 Sigmoid 函数做性能测试,最终输出各版本的计算结果和平均耗时,用来对比不同实现的效率。README.md: 代码的运行说明和运行结果。
🀄️ 2.2 sigmoid.py代码解读
🏆 2.2.1 导入模块与设置
torch.utils.cpp_extension.load:动态编译并加载 CUDA / C++ 扩展。torch.set_grad_enabled(False):关闭梯度计算,减少开销,提高性能。
import time # 用于计时
from functools import partial
from typing import Optional
import torch
from torch.utils.cpp_extension import load
torch.set_grad_enabled(False) # 全局关闭梯度计算(只做推理/性能测试时更快)
🌟 2.2.2 加载 CUDA 内核扩展
使用 torch.utils.cpp_extension.load 将 CUDA 内核编译成 Python 可调用模块。支持不同版本直方图统计计算的内核。
-gencode指定 GPU 架构,以确保内核可以在对应设备上运行。--use_fast_math启用快速数学运算,牺牲精度换性能。
# Load the CUDA kernel as a python module
lib = load(
name="sigmoid_lib",
sources=["sigmoid.cu"], # CUDA 源文件
extra_cuda_cflags=[
"-O3",
"-U__CUDA_NO_HALF_OPERATORS__", # 启用半精度 float16 运算支持
"-U__CUDA_NO_HALF_CONVERSIONS__",
"-U__CUDA_NO_HALF2_OPERATORS__",
"-U__CUDA_NO_BFLOAT16_CONVERSIONS__",
"--expt-relaxed-constexpr",
"--expt-extended-lambda", # 允许 CUDA lambda 扩展
"--use_fast_math", # 使用快速数学运算(牺牲精度换速度)
# new add, 添加针对不同 GPU 架构的编译选项
"-gencode=arch=compute_86,code=sm_86" # 3090
],
extra_cflags=["-std=c++17"],
)
🍎 2.2.3 测试不同方法实现的算子的正确性
代码首先定义了性能测试函数run_benchmark,核心逻辑是:先通过 “预热” 让 GPU 进入稳定状态,再多次重复执行目标函数并精确计时,最后计算平均耗时并输出关键结果。它支持两种模式(传入输出张量原地计算或函数返回新张量),能打印结果的前 2 个元素(验证计算正确性)和平均耗时(评估性能),最终目的是公平对比不同实现(如自定义优化算子与 PyTorch 原生函数)的效率。
def run_benchmark(
perf_func: callable, # 待测试的性能函数(如自定义Sigmoid算子或PyTorch原生函数)
x: torch.Tensor, # 输入张量(GPU上的张量,用于函数计算)
tag: str, # 测试标签(用于区分不同版本的实现,如"f32"、"f16x4")
out: Optional[torch.Tensor] = None, # 输出张量(可选,用于存储计算结果,避免重复分配内存)
warmup: int = 10, # 预热迭代次数(让GPU进入稳定状态,避免首次调用的初始化耗时影响结果)
iters: int = 1000, # 正式计时的迭代次数(多次迭代取平均,提高时间测量精度)
show_all: bool = False, # 是否打印完整的输出张量(默认只打印前2个元素)
):
# 若指定了输出张量,先将其清零(避免之前的计算结果干扰)
if out is not None:
out.fill_(0)
# warmup
# 预热环节:执行多次函数调用,让GPU加载核函数、缓存数据,确保后续计时稳定
if out is not None: # 若有输出张量,调用函数时传入out(原地修改结果)
for i in range(warmup):
perf_func(x, out)
else: # 若无输出张量,直接调用函数(函数内部会返回新结果)
for i in range(warmup):
_ = perf_func(x)
# 同步GPU:确保预热阶段的所有操作都已完成,再进入正式计时
torch.cuda.synchronize()
start = time.time() # 正式计时开始
# iters
# 正式迭代:多次执行函数,累积耗时
if out is not None:
for i in range(iters):
perf_func(x, out)
else:
for i in range(iters):
out = perf_func(x) # 若函数返回新张量,用out接收
# 同步GPU:确保所有迭代操作完成后再停止计时,避免异步执行导致的时间误差
torch.cuda.synchronize()
end = time.time()
# 计算总耗时(转换为毫秒)和平均耗时(总耗时/迭代次数)
total_time = (end - start) * 1000 # ms
mean_time = total_time / iters
# 准备输出信息:标签格式化、取输出张量前2个元素(四舍五入到8位小数)
out_info = f"out_{tag}"
out_val = out.flatten().detach().cpu().numpy().tolist()[:2]
out_val = [round(v, 8) for v in out_val]
# 打印结果:对齐标签、输出前2个元素值、平均耗时
print(f"{out_info:>18}: {out_val}, time:{mean_time:.8f}ms")
# 若需要,打印完整的输出张量
if show_all:
print(out)
return out, mean_time # 返回输出张量和平均耗时(供后续分析或对比)
接着代码通过不同尺寸的具体张亮对比不同版本 Sigmoid 函数的性能。代码首先定义了 9 种不同大小的二维张量(从 1024×1024 到 4096×4096),然后对每种尺寸分别测试两种精度(FP32 单精度、FP16 半精度)下的多个 Sigmoid 实现 —— 包括自定义的基础版、向量优化版(如一次处理 4 个或 8 个元素),以及 PyTorch 原生函数。通过调用性能测试函数,输出每种实现的计算结果(前两个值)和平均耗时,以此直观对比不同优化方式(向量计算、精度调整)对 Sigmoid 运算效率的影响。
# 遍历所有尺寸组合,对每种尺寸进行性能测试
for S, K in SKs:
print("-" * 85)
print(" " * 40 + f"S={S}, K={K}")
# 生成FP32精度的输入张量:
# 形状为(S, K),随机值(符合标准正态分布),存储在GPU上,且内存连续(优化访问速度)
x = torch.randn((S, K)).cuda().float().contiguous()
# 生成与输入同形状、同精度的输出张量(用于存储计算结果,避免重复分配内存)
y = torch.zeros_like(x).cuda().float().contiguous()
# 测试FP32精度的3种Sigmoid实现:
# 1. 自定义基础版(单元素处理)
run_benchmark(lib.sigmoid_f32, x, "f32", y)
# 2. 自定义SIMD优化版(4元素并行处理)
run_benchmark(lib.sigmoid_f32x4, x, "f32x4", y)
# 3. PyTorch原生版(用partial固定输出张量,确保原地计算)
run_benchmark(partial(torch.sigmoid, out=y), x, "f32_th")
print("-" * 85)
# 将输入和输出张量转换为FP16精度(半精度),并确保内存连续
x_f16 = x.half().contiguous()
y_f16 = y.half().contiguous()
# 测试FP16精度的5种Sigmoid实现:
# 1. 自定义基础版(单元素处理)
run_benchmark(lib.sigmoid_f16, x_f16, "f16", y_f16)
# 2. 自定义SIMD优化版(2元素并行处理)
run_benchmark(lib.sigmoid_f16x2, x_f16, "f16x2", y_f16)
# 3. 自定义SIMD优化版(8元素并行处理)
run_benchmark(lib.sigmoid_f16x8, x_f16, "f16x8", y_f16)
# 4. 自定义打包优化版(8元素打包处理,进一步优化内存访问)
run_benchmark(lib.sigmoid_f16x8_pack, x_f16, "f16x8pack", y_f16)
# 5. PyTorch原生版(固定输出张量,原地计算)
run_benchmark(partial(torch.sigmoid, out=y_f16), x_f16, "f16_th")
print("-" * 85)
🌕 2.3 sigmoid.cu代码解读
⚡️ 2.3.1 头文件和宏定义
这段代码是 GPU 加速计算的 “基础工具包”,主要定义了适配不同数据类型(如整数、单精度浮点 FP32、半精度浮点 FP16/BF16)的向量操作宏,以及数值计算中防止溢出的范围常量。它通过宏定义将连续内存中的多个数据打包成 GPU 支持的向量类型(如 4 个 float 打包成 float4),方便后续核函数用 SIMD(单指令多数据)方式并行处理,提升计算效率;同时定义了不同精度下指数函数的安全输入范围,避免计算时出现数值溢出问题。这些定义为后续实现高效的 Sigmoid GPU 算子打下了基础,让代码既能适配多种数据精度,又能充分利用 GPU 的向量计算能力。
// 引入标准算法库,提供基础算法支持(如max、min等)
#include <algorithm>
// 引入CUDA的bfloat16数据类型支持(用于半精度浮点计算)
#include <cuda_bf16.h>
// 引入CUDA的FP16(half)数据类型支持(半精度浮点计算)
#include <cuda_fp16.h>
// 注释:FP8数据类型支持(当前未启用,预留扩展)
// #include <cuda_fp8.h>
// 条件编译:若CUDA编译器版本>=12,启用FP8数据类型支持(新一代硬件支持更低精度计算)
#if __CUDACC_VER_MAJOR__ >= 12
#include <cuda_fp8.h>
#endif
// 引入CUDA运行时API,用于GPU内存管理、核函数调用等底层操作
#include <cuda_runtime.h>
// 引入浮点数常量定义(如FLT_MAX,用于数值范围限制)
#include <float.h>
// 引入标准输入输出库,用于调试打印
#include <stdio.h>
// 引入标准库,提供动态内存分配等功能
#include <stdlib.h>
// 引入PyTorch C++扩展接口,用于与PyTorch张量交互
#include <torch/extension.h>
// 引入PyTorch类型定义,包含张量类型等基础定义
#include <torch/types.h>
// 引入向量容器库,用于动态数组操作
#include <vector>
// 宏定义:GPU的warp大小(NVIDIA GPU的基本执行单元,一个warp含32个线程)
#define WARP_SIZE 32
// 宏定义:将内存地址指向的4个连续int元素转换为int4向量类型(CUDA原生4元素整数向量)
// 用于SIMD优化,一次处理4个整数
#define INT4(value) (reinterpret_cast<int4 *>(&(value))[0])
// 宏定义:将内存地址指向的4个连续float元素转换为float4向量类型(CUDA原生4元素浮点向量)
// 用于FP32精度的SIMD优化,一次加载/处理4个单精度浮点数
#define FLOAT4(value) (reinterpret_cast<float4 *>(&(value))[0])
// 宏定义:将内存地址指向的2个连续half元素转换为half2向量类型(CUDA原生2元素半精度向量)
// 用于FP16精度的SIMD优化,一次加载/处理2个半精度浮点数
#define HALF2(value) (reinterpret_cast<half2 *>(&(value))[0])
// 宏定义:将内存地址指向的2个连续bfloat16元素转换为__nv_bfloat162向量类型
// 用于BF16精度的SIMD优化,一次加载/处理2个bfloat16浮点数
#define BFLOAT2(value) (reinterpret_cast<__nv_bfloat162 *>(&(value))[0])
// 宏定义:将内存地址指向的16字节(128位)数据转换为float4向量类型
// 用于优化内存访问,一次加载/存储128位数据(提升内存带宽利用率)
#define LDST128BITS(value) (reinterpret_cast<float4 *>(&(value))[0])
// 宏定义:FP32精度下exp函数的最大输入值(超过此值时exp输出会溢出,需截断)
#define MAX_EXP_F32 88.3762626647949f
// 宏定义:FP32精度下exp函数的最小输入值(低于此值时exp输出接近0,需截断)
#define MIN_EXP_F32 -88.3762626647949f
// 宏定义:FP16精度下exp函数的最大输入值(转为half类型,避免溢出)
#define MAX_EXP_F16 __float2half(11.089866488461016f)
// 宏定义:FP16精度下exp函数的最小输入值(half类型,避免输出过小)
#define MIN_EXP_F16 __float2half(-9.704060527839234f)
这里#define INT4(value)把某个变量 reinterpret 为 int4 类型指针,然后取第一个 int4。
#define INT4(value) (reinterpret_cast<int4 *>(&(value))[0])
解释:int4 是 CUDA 提供的 4 个 int 的向量类型(4 × 32-bit = 128-bit)。reinterpret_cast<int4 *>(&(value)):将变量的地址视为 int4。[0]:访问这个向量。
用途:用于向量化加载/存储 4 个 int,一次操作 128-bit,提高内存吞吐量。比如:
int data[4] = {1,2,3,4};
int4 vec = INT4(data); // 将 data 当作 int4 使用
📉 2.3.3 FP32 类型Sigmoid算子的 CUDA 核函数实现
🎑 2.3.3.1 基础版(单元素处理)FP32 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f32_kernel)
这段代码是在 GPU 上计算单精度浮点数(FP32)Sigmoid 函数的核心核函数。它通过 “一个线程处理一个数据” 的方式并行计算:先给每个线程分配唯一的全局索引,让线程对应输入数组的一个元素;接着读取元素值并截断到安全范围(避免计算溢出);最后代入 Sigmoid 公式算出结果并写入输出数组。同时通过线程索引检查防止越界,线程配置(256 线程 / 块)也适配了 GPU 硬件特性,能高效利用 GPU 的并行算力。
功能:Sigmoid算子的CUDA核函数(针对fp32类型数据)
grid(N/256):网格维度设置为输入数据量N除以256(每个网格包含若干线程块)block(256):线程块维度为256(每个线程块包含256个线程)参数说明:
x: 输入数组(存放输入数据)y: 输出数组(存放Sigmoid函数计算后结果)N: 输入数组x的元素总数
// 标注当前核函数针对FP32(单精度浮点数)数据类型
// Sigmoid函数数学定义:输入为长度N的数组x,输出为长度N的数组y,满足y[i] = 1/(1+exp(-x[i]))
// 核函数的GPU线程配置说明:
// grid(N/256):网格(grid)维度按输入数据量N除以256设置(每个网格包含多个线程块)
// block(K=256):线程块(block)维度固定为256(每个线程块包含256个并行线程)
// FP32
// Sigmoid x: N, y: N y=1/(1+exp(-x))
// grid(N/256), block(K=256)
__global__ void sigmoid_f32_kernel(float *x, float *y, int N) {
// 计算当前线程的“全局索引”:定位线程在所有线程中的唯一位置
// 公式含义:线程块在网格中的索引 × 块内线程数 + 线程在块内的索引
int idx = blockIdx.x * blockDim.x + threadIdx.x;
// 线程安全检查:仅当全局索引小于输入数据总量N时才执行计算
// 避免因线程总数(网格×线程块)略大于N导致的数组越界访问
if (idx < N) {
// 从GPU全局内存中读取输入数组x在当前索引处的值,存入寄存器v(寄存器访问速度远快于全局内存)
float v = x[idx];
// 数值范围截断:用fminf和fmaxf将v限制在[MIN_EXP_F32, MAX_EXP_F32]之间
// 目的:防止后续expf(-v)计算溢出(v过大时expf(-v)接近0,v过小时expf(-v)溢出)
v = fminf(fmaxf(v, MIN_EXP_F32), MAX_EXP_F32);
// 计算Sigmoid函数值:代入公式y = 1/(1 + exp(-v))
// expf是CUDA的单精度指数函数,计算结果存入输出数组y的对应位置
y[idx] = 1.0f / (1.0f + expf(-v));
}
}
👼 2.3.3.2 SIMD优化版(4元素并行处理)FP32 类型Sigmoid算子的 CUDA 核函数实现
这段代码是单精度浮点数(FP32)Sigmoid 函数的向量优化版本,核心是让一个 GPU 线程同时处理 4 个元素。它通过向量操作一次性加载 4 个连续的输入数据到寄存器,批量完成数值范围截断和 Sigmoid 计算,再一次性将 4 个结果写回内存。线程配置上,每个线程块包含 64 个线程(是基础版的 1/4),保证总处理能力不变但内存访问效率更高。这种 “一次处理 4 个元素” 的方式充分利用了 GPU 的向量计算能力,比单个元素逐个处理更快。
功能:Sigmoid算子的CUDA核函数(针对fp32类型数据)
grid(N/256):网格维度设置为输入数据量N除以256(每个网格包含若干线程块)block(256):线程块维度为256(每个线程块包含256个线程)参数说明:
x: 输入数组(存放输入数据)y: 输出数组(存放Sigmoid函数计算后结果)N: 输入数组x的元素总数
// Sigmoid函数的向量优化版本(Vec4):输入为长度N的数组x,输出为长度N的数组y,满足y[i] = 1/(1+exp(-x[i]))
// 核函数的GPU线程配置说明:
// grid(N/256):网格(grid)维度按输入数据量N除以256设置(与基础版保持一致的总计算规模)
// block(256/4):线程块(block)维度为64(256除以4,因每个线程处理4个元素,匹配GPU算力)
// Sigmoid x: N, y: N y=1/(1+exp(-x)) Vec4
// grid(N/256), block(256/4)
__global__ void sigmoid_f32x4_kernel(float *x, float *y, int N) {
// 计算当前线程的“基索引”:每个线程处理4个连续元素,故索引需×4
// 公式含义:线程块索引×块内线程数(64) + 线程块内索引 → 得到线程处理的“4元素组编号”,再×4得到首个元素的全局索引
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
// 向量加载:将x数组中从idx开始的4个连续float元素,通过FLOAT4类型一次性加载到寄存器reg_x中
// 相比基础版的4次单独加载,向量加载减少内存访问次数,提升内存效率
float4 reg_x = FLOAT4(x[idx]);
float4 reg_y;
// 对向量的4个分量量(x、y、z、w)分别进行数值值范围截断:限制在[MIN_EXP_F32, MAX_EXP_F32]之间
// 防止后续expf计算溢出,与基础版逻辑一致,但批量处理4个元素
reg_x.x = fminf(fmaxf(reg_x.x, MIN_EXP_F32), MAX_EXP_F32);
reg_x.y = fminf(fmaxf(reg_x.y, MIN_EXP_F32), MAX_EXP_F32);
reg_x.z = fminf(fmaxf(reg_x.z, MIN_EXP_F32), MAX_EXP_F32);
reg_x.w = fminf(fmaxf(reg_x.w, MIN_EXP_F32), MAX_EXP_F32);
// 对向量的4个分量分别计算Sigmoid值,存入reg_y的对应分量
// 一次性完成4个元素的公式计算(y = 1/(1 + exp(-v)))
reg_y.x = 1.0f / (1.0f + expf(-reg_x.x));
reg_y.y = 1.0f / (1.0f + expf(-reg_x.y));
reg_y.z = 1.0f / (1.0f + expf(-reg_x.z));
reg_y.w = 1.0f / (1.0f + expf(-reg_x.w));
// 索引检查:确保当前处理的首个元素不越界(避免写入出N范围的内存写入)
if ((idx + 0) < N) {
// 向量存储:将reg_y中的4个结果一次性写入y数组从idx开始的位置
// 相比4次单独存储,减少内存访问次数,提升效率
FLOAT4(y[idx]) = reg_y;
}
}
为什么idx要*4? FLOAT4 会把连续的 4 个元素当作一个向量处理。乘 4 是为了确保每个线程负责的 4 个元素不重叠。
#define FLOAT4(value) (reinterpret_cast<float4 *>(&(value))[0])
举例说明(thread=0,1,2):
| thread | 处理元素 | x4后idx | 处理元素 |
|---|---|---|---|
| 0 | a[0:3] | 0 | a[0:3] |
| 1 | a[1:4] | 4 | a[4:7] |
| 2 | a[2:5] | 8 | a[8:11] |
🔢 2.3.4 FP16 类型Sigmoid算子的 CUDA 核函数实现
✨ 2.3.4.1 基础版(单元素处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16_kernel)
这段代码是在 GPU 上计算半精度浮点数(FP16)Sigmoid 函数的核函数,核心是适配半精度数据的特性做高效计算。它让每个线程处理一个半精度元素:先通过线程索引定位到要处理的元素,再把元素值截断到安全范围(避免计算溢出),最后用半精度专用的指数函数(hexp)和常量,代入 Sigmoid 公式算出结果并写入输出数组。整个过程针对半精度数据优化了函数和常量类型,在保证计算正确的同时,比单精度计算更节省 GPU 内存、提升处理速度。
fp16类型Sigmoid算子的CUDA核函数
参数说明:
x: 输入数组y: 输出数组N: 输入数组x的元素总数
// FP16
__global__ void sigmoid_f16_kernel(half *x, half *y, int N) {
// 计算当前线程的全局索引:线程块索引×块内线程数 + 线程在块内的索引
// 每个线程通过该索引对应输入数组x中的一个半精度元素,实现“单线程处理单元素”
int idx = blockIdx.x * blockDim.x + threadIdx.x;
// 定义半精度常量1.0:通过__float2half函数将CPU端的float型1.0转换为GPU支持的half型
// 半精度计算需使用对应精度的常量,避免类型转换误差
const half f = __float2half(1.0f);
// 线程安全检查:仅当索引小于输入数据总量N时执行计算,防止数组越界访问
if (idx < N) {
// 从GPU全局内存读取输入数组x在当前索引处的半精度值,存入寄存器v(寄存器访问速度远快于全局内存)
half v = x[idx];
// 将v限制在[MIN_EXP_F16, MAX_EXP_F16]之间,避免后续hexp函数计算时出现溢出或数值下溢
v = __hmin(__hmax(v, MIN_EXP_F16), MAX_EXP_F16);
// 计算半精度Sigmoid值:代入公式 y = 1/(1 + exp(-v))
// hexp是CUDA内置的半精度指数函数,专门处理half类型的指数计算,确保精度和效率
y[idx] = f / (f + hexp(-v));
}
}
🥦 2.3.4.2 SIMD优化版(2元素并行处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x2_kernel)
这段代码是半精度浮点数(FP16)Sigmoid 的 “2 元素并行优化版”,核心是让 1 个 GPU 线程同时处理 2 个半精度元素。它先通过向量操作一次性加载 2 个连续的输入数据到寄存器,批量完成数值截断(防止溢出)和 Sigmoid 计算,再一次性把 2 个结果写回内存。相比 “1 线程处理 1 元素” 的基础版,这种方式减少了内存访问次数,充分利用 GPU 的向量计算能力,在节省线程资源的同时,让半精度 Sigmoid 计算更快。
fp16类型Sigmoid算子的CUDA核函数(2元素并行处理)
参数说明:
x: 输入数组y: 输出数组N: 输入数组x的元素总数
// 针对FP16(半精度浮点数)的Sigmoid向量优化核函数(x2表示1个线程处理2个元素)
// 功能:输入长度为N的half数组x,输出长度为N的half数组y,满足y[i] = 1/(1+exp(-x[i]))
__global__ void sigmoid_f16x2_kernel(half *x, half *y, int N) {
// 计算当前线程的“基索引”:每个线程处理2个连续元素,故索引需×2
// 公式含义:线程块索引×块内线程数 + 线程块内索引 → 得到“2元素组编号”,再×2得到首个元素的全局索引
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 2;
// 定义半精度常量1.0:通过__float2half将float型1.0转为GPU支持的half型,避免类型转换误差
const half f = __float2half(1.0f);
// 向量加载:通过HALF2宏,将x数组中从idx开始的2个连续half元素,一次性加载为half2向量类型存入寄存器reg_x
// 相比单元素加载,减少1次内存访问,提升内存带宽利用率
half2 reg_x = HALF2(x[idx]);
half2 reg_y;
// 对half2向量的两个分量(x、y)分别做数值范围截断
// 使用半精度专用函数__hmin/__hmax,将分量限制在[MIN_EXP_F16, MAX_EXP_F16],防止后续hexp计算溢出
reg_x.x = __hmin(__hmax(reg_x.x, MIN_EXP_F16), MAX_EXP_F16);
reg_x.y = __hmin(__hmax(reg_x.y, MIN_EXP_F16), MAX_EXP_F16);
// 对两个分量分别计算Sigmoid值:代入公式 y = 1/(1 + exp(-v))
// 使用半精度专用指数函数hexp,确保计算精度和效率,结果存入reg_y对应分量
reg_y.x = f / (f + hexp(-reg_x.x));
reg_y.y = f / (f + hexp(-reg_x.y));
if ((idx + 0) < N) {
// 向量存储:通过HALF2宏,将reg_y中的2个结果一次性写入y数组从idx开始的位置
// 相比单元素存储,减少1次内存访问,提升效率
HALF2(y[idx]) = reg_y;
}
}
🥒 2.3.4.3 SIMD优化版(8元素并行处理)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x8_kernel)
这段代码是半精度浮点数(FP16)Sigmoid 的 “8 元素并行优化版”,核心是让 1 个 GPU 线程一次处理 8 个半精度元素。它把 8 个元素拆成 4 组,每组 2 个元素,用 half2 向量操作批量加载到寄存器;接着逐个对 8 个元素做数值截断(防溢出)、算 Sigmoid 值;最后再分 4 组批量写回结果,还单独检查每组索引避免越界。相比 1 个线程处理 1 个或 2 个元素,这种方式能更充分利用 GPU 的向量计算能力和内存带宽,让半精度 Sigmoid 的计算效率更高。
fp16类型Sigmoid算子的CUDA核函数(8元素并行处理)
参数说明:
x: 输入数组y: 输出数组N: 输入数组x的元素总数
// unpack f16x8
// 半精度(FP16)Sigmoid的8元素并行优化核函数(unpack表示通过多个half2向量拆分处理8元素)
// 功能:输入长度为N的half数组x,输出长度为N的half数组y,每个元素满足Sigmoid公式y[i] = 1/(1+exp(-x[i]))
__global__ void sigmoid_f16x8_kernel(half *x, half *y, int N) {
// 计算当前线程的“基索引”:每个线程处理8个连续元素,故索引需×8
// 公式含义:线程块索引×块内线程数 + 线程块内索引 → 得到“8元素组编号”,再×8得到首个元素的全局索引
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 8;
// 定义半精度常量1.0:通过__float2half将CPU端float型1.0转为GPU支持的half型,避免类型转换误差
const half f = __float2half(1.0f);
// 分4次加载8个半精度元素:每次通过HALF2宏加载2个连续元素,存入4个half2向量寄存器
// 对应加载x[idx]&x[idx+1]、x[idx+2]&x[idx+3]、x[idx+4]&x[idx+5]、x[idx+6]&x[idx+7]
half2 reg_x_0 = HALF2(x[idx + 0]);
half2 reg_x_1 = HALF2(x[idx + 2]);
half2 reg_x_2 = HALF2(x[idx + 4]);
half2 reg_x_3 = HALF2(x[idx + 6]);
// 对4个half2向量的8个分量(每个向量含x、y两个分量)逐个做数值范围截断
// 使用半精度专用函数__hmin/__hmax,将分量限制在[MIN_EXP_F16, MAX_EXP_F16],防止后续hexp计算溢出
reg_x_0.x = __hmin(__hmax(reg_x_0.x, MIN_EXP_F16), MAX_EXP_F16);
reg_x_0.y = __hmin(__hmax(reg_x_0.y, MIN_EXP_F16), MAX_EXP_F16);
reg_x_1.x = __hmin(__hmax(reg_x_1.x, MIN_EXP_F16), MAX_EXP_F16);
reg_x_1.y = __hmin(__hmax(reg_x_1.y, MIN_EXP_F16), MAX_EXP_F16);
reg_x_2.x = __hmin(__hmax(reg_x_2.x, MIN_EXP_F16), MAX_EXP_F16);
reg_x_2.y = __hmin(__hmax(reg_x_2.y, MIN_EXP_F16), MAX_EXP_F16);
reg_x_3.x = __hmin(__hmax(reg_x_3.x, MIN_EXP_F16), MAX_EXP_F16);
reg_x_3.y = __hmin(__hmax(reg_x_3.y, MIN_EXP_F16), MAX_EXP_F16);
// 定义4个half2向量寄存器,用于存储8个元素的Sigmoid计算结果
half2 reg_y_0, reg_y_1, reg_y_2, reg_y_3;
// 对8个分量逐个计算Sigmoid值:代入公式y = 1/(1 + exp(-v))
// 使用半精度专用指数函数hexp处理half类型,结果存入对应reg_y向量的分量
reg_y_0.x = f / (f + hexp(-reg_x_0.x));
reg_y_0.y = f / (f + hexp(-reg_x_0.y));
reg_y_1.x = f / (f + hexp(-reg_x_1.x));
reg_y_1.y = f / (f + hexp(-reg_x_1.y));
reg_y_2.x = f / (f + hexp(-reg_x_2.x));
reg_y_2.y = f / (f + hexp(-reg_x_2.y));
reg_y_3.x = f / (f + hexp(-reg_x_3.x));
reg_y_3.y = f / (f + hexp(-reg_x_3.y));
// 分4次存储8个结果:每次通过HALF2宏存储2个元素,且单独检查索引避免越界
// 分别存储到y[idx]&y[idx+1]、y[idx+2]&y[idx+3]、y[idx+4]&y[idx+5]、y[idx+6]&y[idx+7]
if ((idx + 0) < N) {
HALF2(y[idx + 0]) = reg_y_0;
}
if ((idx + 2) < N) {
HALF2(y[idx + 2]) = reg_y_1;
}
if ((idx + 4) < N) {
HALF2(y[idx + 4]) = reg_y_2;
}
if ((idx + 6) < N) {
HALF2(y[idx + 6]) = reg_y_3;
}
}
🥔 2.3.4.4 SIMD优化版(8元素打包处理,进一步优化内存访问)FP16 类型Sigmoid算子的 CUDA 核函数实现(sigmoid_f16x8_pack_kernel)
这段代码是半精度浮点数(FP16)Sigmoid 的 “8 元素打包优化版”,核心是用 128 位打包方式进一步提升内存访问效率。它让 1 个 GPU 线程处理 8 个半精度元素:先通过 1 次 128 位内存访问,把 8 个元素一次性加载到临时数组;再用循环展开优化,并行完成 8 个元素的数值截断和 Sigmoid 计算;最后在确认不越界的情况下,通过 1 次 128 位访问把 8 个结果批量写回。相比拆分加载 / 存储的版本,这种 “1 次加载 8 个、1 次存储 8 个” 的打包方式,最大限度减少了内存访问次数,让 GPU 算力更充分发挥,计算速度更快。
fp16类型Sigmoid算子的CUDA核函数(8元素打包处理,进一步优化内存访问)
参数说明:
x: 输入数组y: 输出数组N: 输入数组x的元素总数
// pack f16x8
// 半精度(FP16)Sigmoid的8元素打包优化核函数(pack表示用128位打包方式加载/存储8个元素)
// 功能:输入长度为N的half数组x,输出长度为N的half数组y,每个元素满足Sigmoid公式y[i] = 1/(1+exp(-x[i]))
__global__ void sigmoid_f16x8_pack_kernel(half *x, half *y, int N) {
// 计算当前线程的“基索引”:每个线程处理8个连续元素,故索引需×8
// 公式含义:线程块索引×块内线程数 + 线程块内索引 → 得到“8元素组编号”,再×8得到首个元素的全局索引
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 8;
// 定义半精度常量1.0:通过__float2half将CPU端float型1.0转为GPU支持的half型,避免类型转换误差
const half f = __float2half(1.0f);
// temporary register(memory), .local space in ptx, addressable
// 定义两个半精度数组作为临时寄存器:pack_x存输入的8个元素,pack_y存计算结果
// 8个half元素共128位(8×16bit),适配GPU的128位内存访问粒度
half pack_x[8], pack_y[8]; // 8x16 bits=128 bits.
// reinterpret as float4 and load 128 bits in 1 memory issue.
// 128位打包加载:通过LDST128BITS宏,将x数组中从idx开始的128位数据(即8个half元素)
// 以float4类型(128位)一次性加载到pack_x数组起始位置,仅需1次内存访问
// reinterpret as float4 and load 128 bits in 1 memory issue.
LDST128BITS(pack_x[0]) = LDST128BITS(x[idx]); // load 128 bits
// 循环展开优化:#pragma unroll 指令让编译器将循环展开为8次独立操作
// 避免循环控制开销,同时让8个元素的计算能并行执行,提升效率
#pragma unroll
for (int i = 0; i < 8; ++i) {
// 对每个元素做数值范围截断:用__hmin/__hmax限制在[MIN_EXP_F16, MAX_EXP_F16],防止hexp溢出
half v = __hmin(__hmax(pack_x[i], MIN_EXP_F16), MAX_EXP_F16);
// 计算Sigmoid值,结果存入pack_y对应位置
pack_y[i] = f / (f + hexp(-v));
}
// reinterpret as float4 and store 128 bits in 1 memory issue.
// 128位打包存储:仅当当前8元素组的最后一个元素(idx+7)未越界时,
// 通过LDST128BITS宏将pack_y中的128位数据(8个结果)一次性写入y数组,仅需1次内存访问
// reinterpret as float4 and store 128 bits in 1 memory issue.
if ((idx + 7) < N) {
LDST128BITS(y[idx]) = LDST128BITS(pack_y[0]);
}
}
🦭 2.3.5 把 CUDA kernel 封装成 PyTorch 可调用的扩展函数
剩余代码主要是将不同版本的 CUDA histogram kernel封装成 PyTorch 扩展函数,并通过 PyBind11 注册到 Python 中。
核心代码主要是以下内容:
- 用
TORCH_BINDING_ELEM_ADD自动生成一系列 C++ 封装函数。- 用
PYBIND11_MODULE和m.def把这些函数绑定到 Python模块里。- 最终,Python 可以直接调用这些扩展函数,而内部会执行高性能 CUDA 内核。
// 宏定义1:将输入的标识符转换为字符串(例如把func转为"func")
// 用于后续绑定函数时,统一函数名的字符串表示
#define STRINGFY(str) #str
// 宏定义2:通用的PyTorch函数绑定宏
// 功能:将C++函数func绑定到PyTorch模块m中,函数名(字符串形式)与函数本身同名
// 作用:简化多个函数的重复绑定代码,避免手动写重复的def调用
#define TORCH_BINDING_COMMON_EXTENSION(func) \
m.def(STRINGFY(func), &func, STRINGFY(func));
// 宏定义3:PyTorch张量数据类型检查宏
// 功能:检查张量T的数据类型是否等于指定的th_type
// 若不匹配:打印张量当前的类型信息,并抛出运行时错误(提示需使用th_type类型)
#define CHECK_TORCH_TENSOR_DTYPE(T, th_type) \
if (((T).options().dtype() != (th_type))) { \
std::cout << "Tensor Info:" << (T).options() << std::endl; \
throw std::runtime_error("values must be " #th_type); \
}
这个宏是生成 Sigmoid 函数 C++ 接口的 “自动化工具”,核心是根据不同参数批量生成适配不同精度、不同优化版本的接口函数,同时智能配置 GPU 线程。它先检查输入输出张量的数据类型是否正确,再根据张量维度(是否为 2 维)和特征数大小,分三种情况配置线程块和网格:非 2 维张量按 “总元素数” 分配线程,2 维张量若特征数适中则按 “样本级” 并行(每个线程块处理 1 个样本),特征数过大则退化为 “总元素数” 模式。最后调用对应的 CUDA 核函数完成计算,让不同版本的 Sigmoid 核函数都能通过统一的接口被 Python 调用,还能适配不同形状的张量,兼顾正确性和效率。
// 定义Sigmoid函数的通用绑定宏,用于批量生成不同版本的C++接口函数
// 参数说明:
// packed_type:函数名后缀(如f32、f32x4、f16x8,区分不同精度/优化版本)
// th_type:输入/输出张量要求的PyTorch数据类型(如torch::kFloat32、torch::kHalf)
// element_type:底层数据类型(如float、half,用于指针转换)
// n_elements:每个线程处理的元素数量(如1、4、8,匹配对应核函数的优化方式)
#define TORCH_BINDING_SIGMOID(packed_type, th_type, element_type, n_elements) \
// 生成具体的Sigmoid接口函数,函数名格式为sigmoid_+packed_type(如sigmoid_f32)
// 输入x为待计算的PyTorch张量,输出y为存储结果的PyTorch张量(原地计算)
void sigmoid_##packed_type(torch::Tensor x, torch::Tensor y) { \
// 检查输入张量x和输出张量y的数据类型是否符合要求(如是否为float32),不匹配则抛错
CHECK_TORCH_TENSOR_DTYPE(x, (th_type)) \
CHECK_TORCH_TENSOR_DTYPE(y, (th_type)) \
// 获取输入张量x的维度数量(如2D表示[样本数, 特征数])
const int ndim = x.dim(); \
// 分支1:处理非2维张量(如1D、3D等)
if (ndim != 2) { \
// 计算张量的总元素数N(将各维度大小相乘,如3D张量[2,3,4]的N=2*3*4=24)
int N = 1; \
for (int i = 0; i < ndim; ++i) { \
N *= x.size(i); \
} \
// 配置CUDA线程块大小:256除以每个线程处理的元素数(保证总算力适配256的基准)
// 如n_elements=4时,块大小=256/4=64
dim3 block(256 / (n_elements)); \
// 配置CUDA网格大小:向上取整((N+256-1)/256),确保所有元素都能被处理
dim3 grid((N + 256 - 1) / 256); \
// 调用对应的CUDA核函数(如sigmoid_f32_kernel),传入张量的GPU内存指针和总元素数
sigmoid_##packed_type##_kernel<<<grid, block>>>( \
reinterpret_cast<element_type *>(x.data_ptr()), \
reinterpret_cast<element_type *>(y.data_ptr()), N); \
// 分支2:处理2维张量(最常见场景,如[样本数S, 特征数K])
} else { \
// 提取2维张量的两个维度大小:S为样本数,K为每个样本的特征数
const int S = x.size(0); \
const int K = x.size(1); \
// 计算总元素数N = 样本数 × 特征数
const int N = S * K; \
// 子分支2.1:若特征数K除以每个线程处理的元素数后≤1024(符合GPU线程块大小限制)
if ((K / (n_elements)) <= 1024) { \
// 线程块大小=特征数K / 每个线程处理元素数(让每个线程块处理1个样本的所有特征)
dim3 block(K / (n_elements)); \
// 网格大小=样本数S(每个网格处理1个样本)
dim3 grid(S); \
// 调用核函数,按“样本级并行”处理2维张量
sigmoid_##packed_type##_kernel<<<grid, block>>>( \
reinterpret_cast<element_type *>(x.data_ptr()), \
reinterpret_cast<element_type *>(y.data_ptr()), N); \
// 子分支2.2:若特征数K过大,超出线程块大小限制(>1024)
} else { \
// 退化为“总元素数”模式,计算总元素数N
int N = 1; \
for (int i = 0; i < ndim; ++i) { \
N *= x.size(i); \
} \
// 配置线程块和网格大小(同非2维张量的逻辑)
dim3 block(256 / (n_elements)); \
dim3 grid((N + 256 - 1) / 256); \
// 调用核函数,按“总元素并行”处理2维张量
sigmoid_##packed_type##_kernel<<<grid, block>>>( \
reinterpret_cast<element_type *>(x.data_ptr()), \
reinterpret_cast<element_type *>(y.data_ptr()), N); \
} \
} \
}
最后代码通过宏调用批量生成了 6 个不同版本的 Sigmoid 接口函数(涵盖单精度、半精度,以及不同元素并行处理的优化版本),并将这些函数绑定到 PyTorch 扩展模块中。这样一来,Python 代码就能直接调用这些函数,无需关心底层 CUDA 核函数的实现细节,轻松使用不同精度和优化方式的 GPU 加速 Sigmoid 计算,方便对比性能和正确性。
// 调用TORCH_BINDING_SIGMOID宏,生成6个不同版本的Sigmoid接口函数:
// 1. f32版本:单精度浮点(FP32),每个线程处理1个元素
TORCH_BINDING_SIGMOID(f32, torch::kFloat32, float, 1)
// 2. f32x4版本:FP32,每个线程处理4个元素(向量优化)
TORCH_BINDING_SIGMOID(f32x4, torch::kFloat32, float, 4)
// 3. f16版本:半精度浮点(FP16),每个线程处理1个元素
TORCH_BINDING_SIGMOID(f16, torch::kHalf, half, 1)
// 4. f16x2版本:FP16,每个线程处理2个元素(向量优化)
TORCH_BINDING_SIGMOID(f16x2, torch::kHalf, half, 2)
// 5. f16x8版本:FP16,每个线程处理8个元素(向量优化,拆分加载/存储)
TORCH_BINDING_SIGMOID(f16x8, torch::kHalf, half, 8)
// 6. f16x8_pack版本:FP16,每个线程处理8个元素(向量优化,128位打包加载/存储)
TORCH_BINDING_SIGMOID(f16x8_pack, torch::kHalf, half, 8)
// 定义PyTorch扩展模块,模块名由TORCH_EXTENSION_NAME指定(编译时配置,如"sigmoid_lib")
PYBIND11_MODULE(TORCH_EXTENSION_NAME, m) {
// 将生成的6个Sigmoid接口函数绑定到模块m中,使Python可调用:
// 绑定后,Python中可通过"模块名.sigmoid_f32"等方式调用
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f32)
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f32x4)
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f16)
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f16x2)
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f16x8)
TORCH_BINDING_COMMON_EXTENSION(sigmoid_f16x8_pack)
}
⛪️ 三、小结
⭐️⭐️⭐️ 路漫漫其修远兮,吾将上下而求索。Fighting!⭐️⭐️⭐️

鲲鹏昇腾开发者社区是面向全社会开放的“联接全球计算开发者,聚合华为+生态”的社区,内容涵盖鲲鹏、昇腾资源,帮助开发者快速获取所需的知识、经验、软件、工具、算力,支撑开发者易学、好用、成功,成为核心开发者。
更多推荐



 44
44 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)